Первая ракета «Лин Индастриал»: подготовка к пуску
Все ближе старт первой ракеты, произведенной нашей компанией.
Данная ракета взлетит не более чем на 1 км и нужна исключительно для отработки системы управления. Поэтому мы часто называем ее внутри компании «летающим стендом», чтобы не путать с прототипами, которые будут летать на жидкостных ракетных двигателях, потребляющих керосин и перекись водорода.
Двигатель ракеты изготовлен российской фирмой Real Rockets. Он работает 2,5 секунды, выдавая тягу в среднем около 12 кг. Полный импульс двигателя — 300 Н∙с.

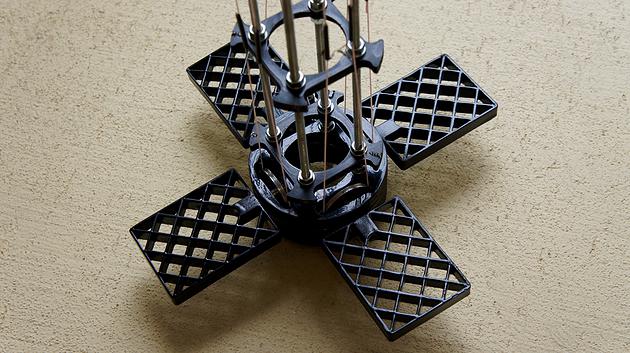
Система управления с помощью рулевых машинок будет управлять ракетой решетчатыми рулями, расположенными в хвостовой части ракеты.

Однако в первом полете рули будут застопорены — мы только снимем показания с гироскопов системы управления, чтобы убедиться, что они выдают корректные данные даже при больших ускорениях ракетного полета.
В следующих пусках система управления будет уже реагировать на отклонения ракеты от вертикальной траектории и поворачивать рули так, чтобы снова лететь строго вверх.
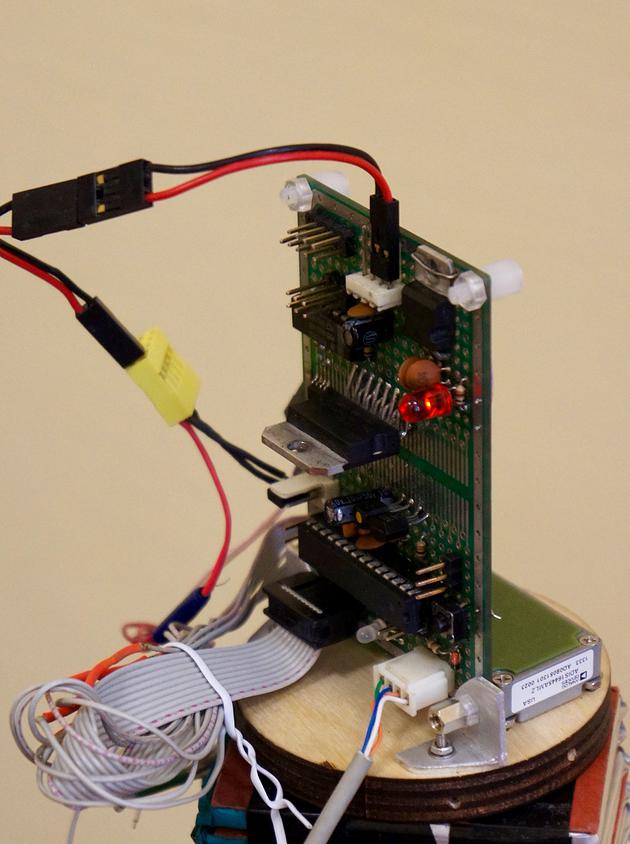
Наша система управления построена на основе MEMS-гироскопов. В начале космической эры для того, чтобы определять угол отклонения ракеты от заданной траектории, на всех ракетах стояли традиционные механические гироскопы. Их недостатки известны — большая масса и габариты, чувствительность к резким толчкам и ударам. В современной ракетной технике постепенно отказывают от механических гироскопов, заменяя их волоконно-оптическими. Такие устройства обладают приемлемой для ракетостроения точностью измерения углов и очень компактны.
Система управления «Таймыра» будет использовать MEMS-гироскопы с емкостными датчиками. Они обладают меньшей точностью, чем лазерные гироскопы, зато гораздо дешевле (минимум в 3 раза). Но даже с MEMS-гироскопами можно обеспечить выведение в космос с приемлемой точностью, если использовать разные хитрости — например, коррекцию по солнечному (или даже лунному) датчику и специальную программную обработку сигнала. Система управления и ее программное обеспечение является ноу-хау «Лин Индастриал». На испытательной ракете полетит ее прототип, в составе которого один трехосный MEMS-акселерометр и три MEMS-гироскопа (по одному на каждую ось).
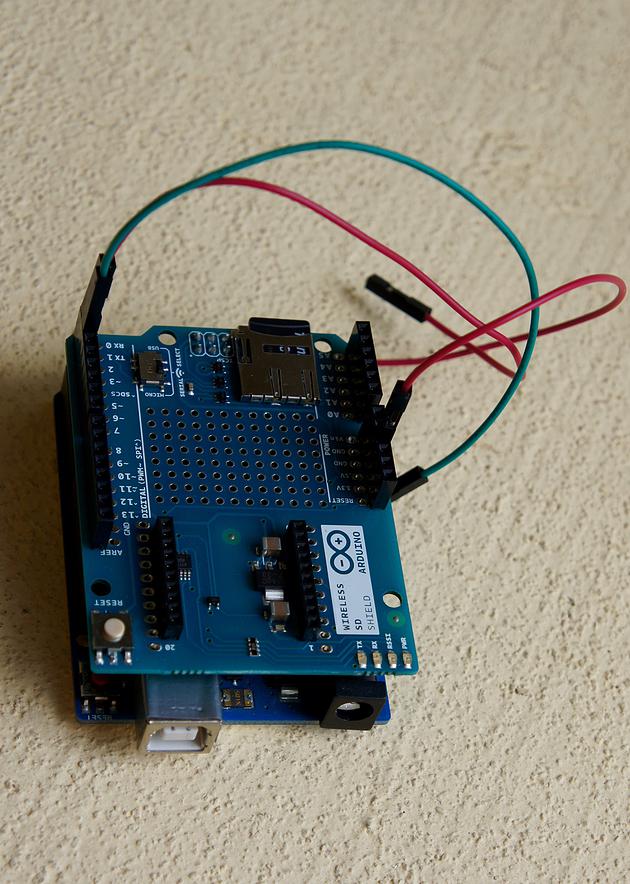
Запись данных с гироскопов во время полета будет идти на внутреннюю память системы управления и дублироваться на карточку памяти формата SD. Устройство записи сделано на основе микроконтроллера и модуля связи для платформы Arduino.
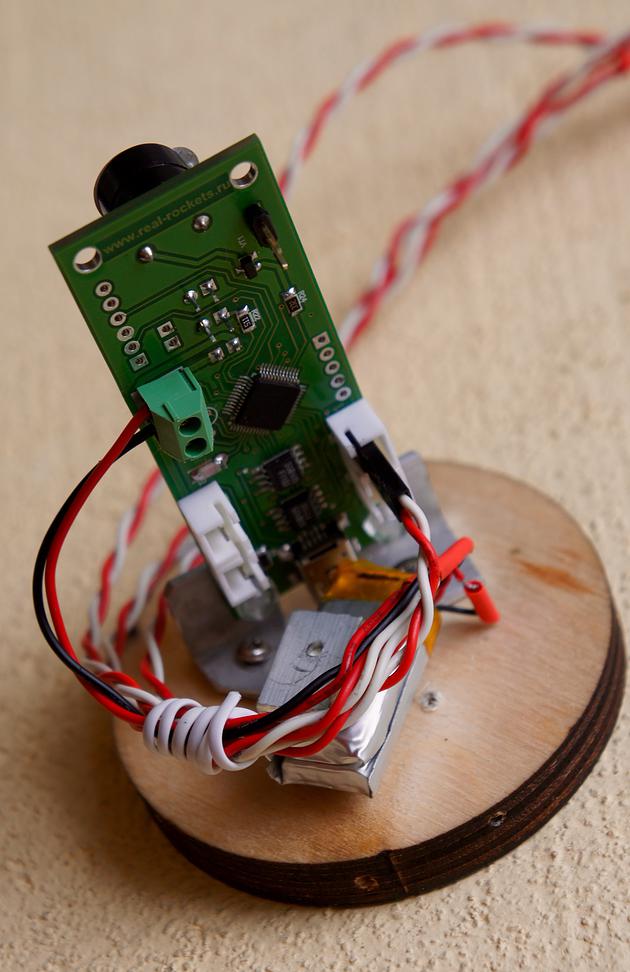
Естественно, что в завершение полета ракета вместе со всей аппаратурой должна мягко опуститься на землю на парашюте. За это ответственен полетный контроллер ComFly-030 производства компании Real Rockets. Контролер автономен и определяет старт ракеты как быстрый набор высоты свыше 12 метров по датчику атмосферного давления. Затем он бездействует, пока ракета летит вверх и давление, соответственно, падает. Как только ракета начинает снижаться и давление вырастает, контроллер выдает сигнал поджига на небольшой пороховой заряд, который вышибает парашют из специального отсека.
Подобные полеты по российскому законодательству можно проводить только в
согласованной с властями зоне, чтобы избежать столкновения с
самолетами. Мы собираемся запустить ракету в воздушном пространстве
аэродрома, которое уже легально закрыто от посторонних полетов — нам
останется только уведомить о своем пуске руководство аэродрома. Сейчас
«Лин Индастриал» ведет переговоры с несколькими площадками неподалеку от
Москвы.