Очередное испытание системы управления в полете

15 октября 2015 года компания «Лин Индастриал» провела очередные испытания системы управления в полете.
Конструкция ракеты подробно описана нами ранее. Но к этому пуску она была существенно доработана по сравнению с предыдущим полетом.
Основные доработки:
1. Ракета стала двухступенчатой. Два твердотопливных двигателя РД-1-300-0 производства российской фирмы Real Rockets установлены в крепления в хвостовом отсеке ракеты. Крепления — розового цвета (кстати, все детали контрастных цветов распечатаны на 3D-принтере). Оба боковых двигателя запускаются на старте, а через 1,75 секунд запускается центральный двигатель того же типа. Поскольку РД-1-300-0 работает 2,5 секунды, то центральный двигатель выходит на режим как раз тогда, когда боковые прекращают давать тягу. За счет двухступенчатости активный участок полета ракеты увеличивается до почти 5 секунд. Этого достаточно, чтобы посмотреть, работает ли система управления и скорректировать коэффициенты в уравнении управления.
2. Мы отказались от применения в управлении покупного контроллера и полностью перешли на собственную систему управления — она не только управляет рулями и записывает данные с датчиков, но также запускает третий двигатель в полете и выпускает парашют.
3. Решетчатые рули теперь имеют Д-образную форму, а не прямоугольную.
Они изготовлены не фрезеровкой из оргстекла на станке, а отпечатаны на 3D-принтере.

Теперь к результатам испытаний.
График 1. Ускорение по продольной оси ракеты (g) от времени полета (с)
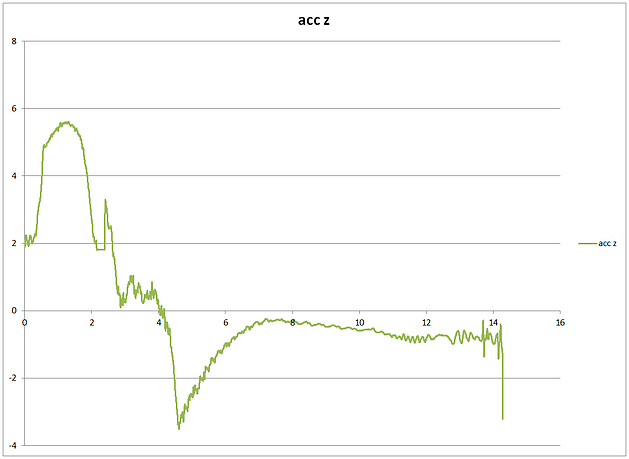
Участок от 0 до примерно 2-й секунды полета — это работа двигателей первой ступени. Затем включается вторая ступень. Из-за особенностей конструкции системы управления на небольшое время данные по ускорению перестали поступать (небольшая горизонтальная линия на графике). Затем работала вторая ступень, постепенно снижая тягу (примерно до 3-й секунды). Затем вторая ступень продолжала выдавать остатки тяги толчками вплоть до 4-й секунды. Потом ракета летела вверх, постепенно замедляясь из-за силы тяжести и сопротивления воздуха. Примерно с 7 секунды она стала снижаться и на 14-й секунде приземлилась.
Максимальная достигнутая высота — 200 м.
График 2. Высота полета (м) по датчику атмосферного давления
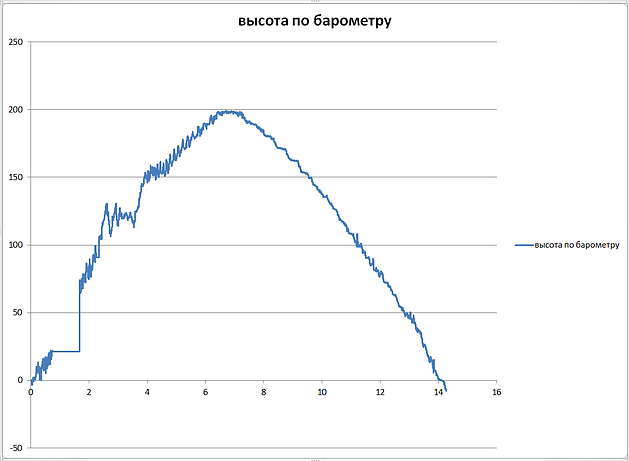
Система управления должна была выбросить парашют в апогее (высшей точке подъема), но она неправильно обработала данные датчика давления воздуха и не выбросила парашют. К счастью, эта операция дублировалась — если не срабатывал датчик давления, то парашют выбрасывало через 14 секунд после старта ракеты. Поскольку ракета в этот момент была уже близко к земле и приземлилась через небольшое время после истечения этих 14 секунд, то посадка вышла довольно жесткой.
Перейдем к тому, как работала система управления, а работала она, заметим, в целом нормально.
Сначала рассмотрим управление по крену или, проще говоря, управление вращением ракетой вокруг продольной оси.
График 3. Угол крена (градусы), угловая скорость по крену (градус/секунда), выдача команд на рулевые машинки
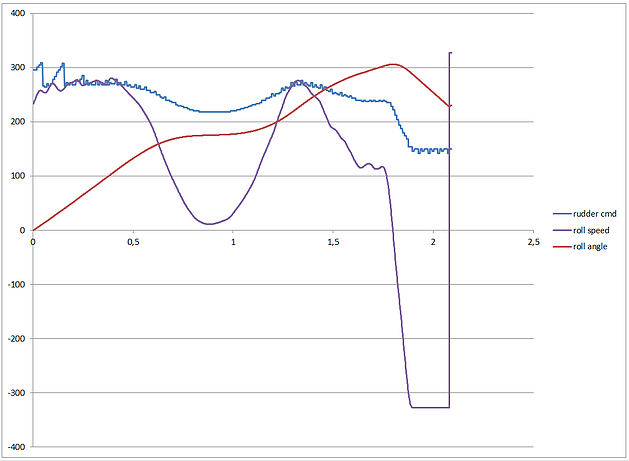
В этом испытании, как и в предыдущем, мы заклинили одну пару рулей, а управляли только второй парой.
И так же, как в предыдущем полете, рули пытались замедлить вращение ракеты, которое было вызвано дисбалансом тяги двигателей первой ступени (несмотря на то, что теоретически оба двигателя должны стартовать одновременно, в реальности между ними всегда есть задержка) и закруткой ракеты после схода со стартового стола (в будущем мы доработаем стартовый стол — ракета будет стартовать вертикально между двух направляющих). Ракета сошла со стартового стола в 0,4 секунды, затем система управления к 1-й секунде снизила скорость вращения почти до нуля, но затем на полную мощность заработал второй двигатель, и ракета снова начала вращаться вокруг своей оси.
Угол поворота по крену достиг 208 градусов (относительно начальной ориентации ракеты) примерно на 1,3 секунде полета. В этом момент произошло переполнение. Дело в том, что угловая скорость по крену в нашей системе управления задается четырьмя байтами, однако программа до сих пор использовала только младшие три из них для выдачи команд на рулевые машинки. Это было сделано для оптимизации кода. Предполагалось, что система управления на орбитальной ракете в штатном режиме просто не будет допускать такого сильного поворота.
Из-за переполнения система управления оказалась дезориентированной и поэтому допустила слишком быстрое вращение вокруг продольной оси — с угловой скоростью 327 градусов/сек. Гироскопы не рассчитаны на столь быстрое вращение, поэтому их зашкалило. Это произошло на 2,089 секунде.
Тем не менее до зашкаливания система работала нормально.
Если в предыдущем испытании система управления пыталась стабилизировать ракету только по крену (иными словами, прекратить вращение вокруг продольной оси ракеты), то в этом она выставляла рули так, чтобы стабилизировать ее и по крену, и по тангажу (стабилизировать по тангажу — прекратить вращение в плоскости, которая проходит через продольную ось ракеты и при этом перпендикулярна поверхности Земли, а точнее — плоскости местного горизонта).
Небольшая памятка для тех, кто запутался в осях.
Рисунок 1. Оси ракеты

Как видно из графика 4 (ниже), до 2-й секунды полета система управления удерживала отклонение ракеты по тангажу в пределах ±10 градусов. Потом, как мы уже писали, запустился центральный двигатель и «что-то пошло не так».
График 4. Угол поворота ракеты по тангажу (градусы) и рысканью (градусы)
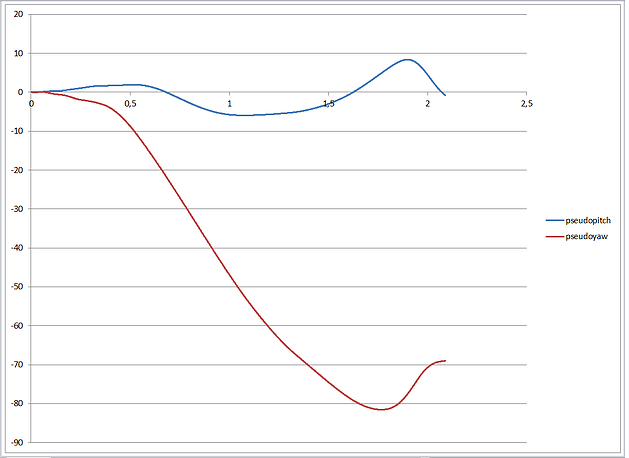
Угол рысканья никак не контролировался. В следующих полетах система управления будет рулить всеми четырьмя рулями и сможет стабилизировать ракету и по рысканью.
Основные выводы по результатам испытаний:
1. Система управления действительно работает и стабилизирует ракету. Данные, полученные в полете, позволят скорректировать коэффициенты в уравнении управления ракетой и сделать полет стабильнее.
2. Выявлены программные и аппаратные ошибки в системе управления — неправильные критерии выброса парашюта, отсутствие защиты от короткого замыкания, игнорирование программой старшего из четырех байтов угловой скорости при выдаче команд на рулевые машинки. Сами по себе эти ошибки не принципиальны с точки зрения управления, но могут легко превратить успешный полет в неуспешный. Ошибки будут устранены.
3. Мелкие технические ошибки. Потребуется доработка стартовой установки — ракета будет сходить по двум направляющим, а не по одной, для большей стабильности. Кроме того, в Россию пришли холода, а, следовательно, аккумуляторы всех систем стали разряжаться быстрее. Они будут дополнительно проверяться на разряд и термоизолироваться перед стартом.
Напоследок несколько снимков полета испытательной ракеты.


