«Летающий стенд»: версия 2.0
Перед Новым годом, 29 декабря совершила полет наша ракета для испытания прототипа системы управления космической ракеты-носителя. Мы в фирме называем ее «летающим стендом», поскольку самостоятельного значения у этой ракеты нет — она служит только для отработки системы управления.
Эта ракета была не доработанной старой конструкцией, а полностью новым устройством. Из бросающихся в глаза отличий (кроме, естественно, цвета) — более компактные видеокамеры и хвостовой отсек под четыре двигателя. Благодаря большему количеству двигателей полет «стенда» может длиться дольше и, соответственно, появляется больше времени на проверку системы управления.
Сегодня мы публикуем расширенное описание «летающего стенда» версии 2.0.
Итак, данное изделие включает в себя:
- хвостовую часть с рулевыми машинами, рулями и твердотопливными двигателями;
- отсек системы управления (СУ) с самой СУ и аккумуляторами, прибором AltimeterThree, GPS-трекером, электронным блоком на базе Arduino, а также двумя видеокамерами с внешней стороны отсека;
- переднюю часть с оживальным обтекателем, вышибным пирозарядом и парашютом.
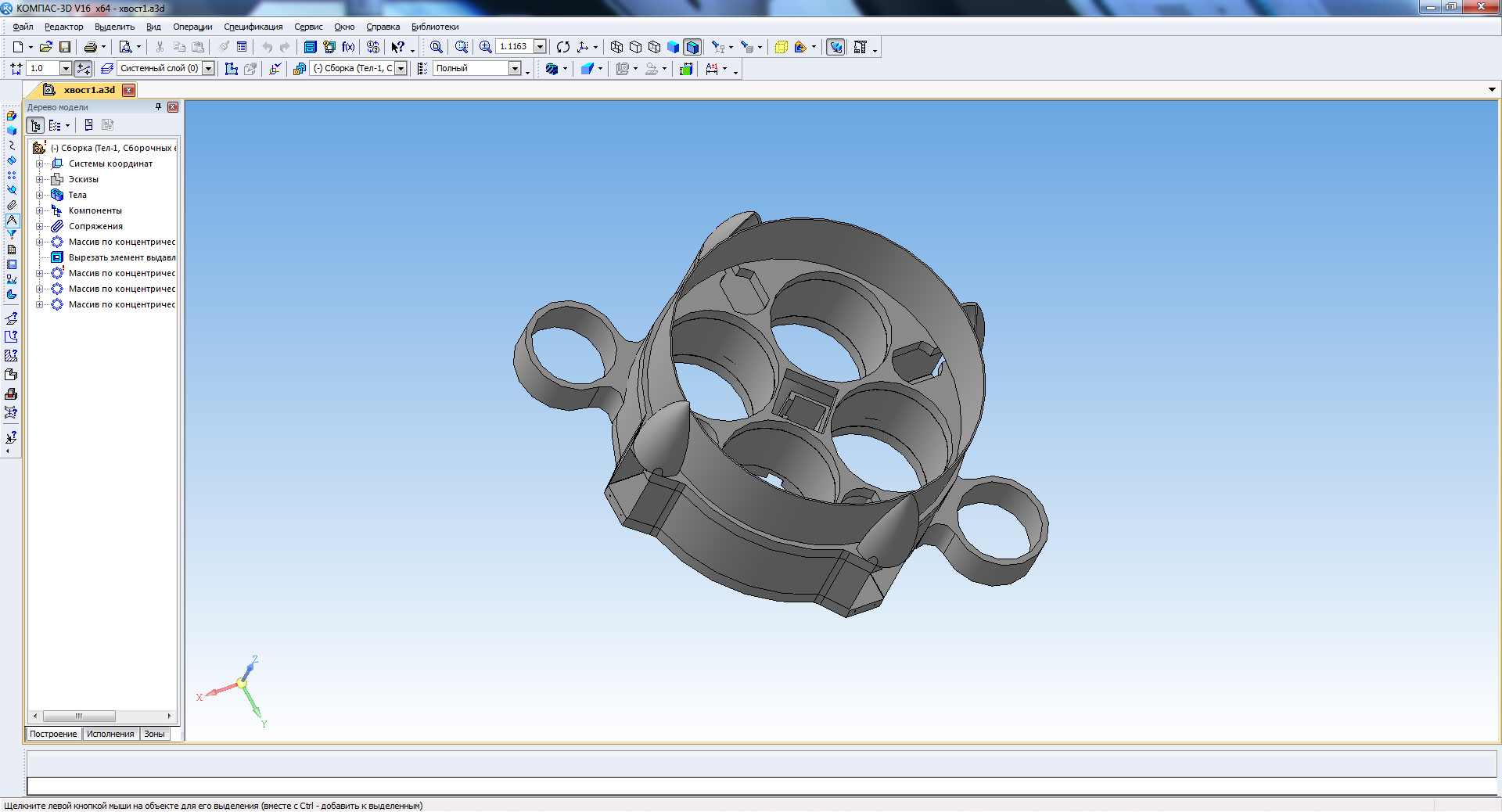
Хвостовая часть
Снизу хвостовая часть заканчивается торцевым шпангоутом. Шпангоут распечатан на 3D-принтере.
Рули также были напечатаны на 3D-принтере.
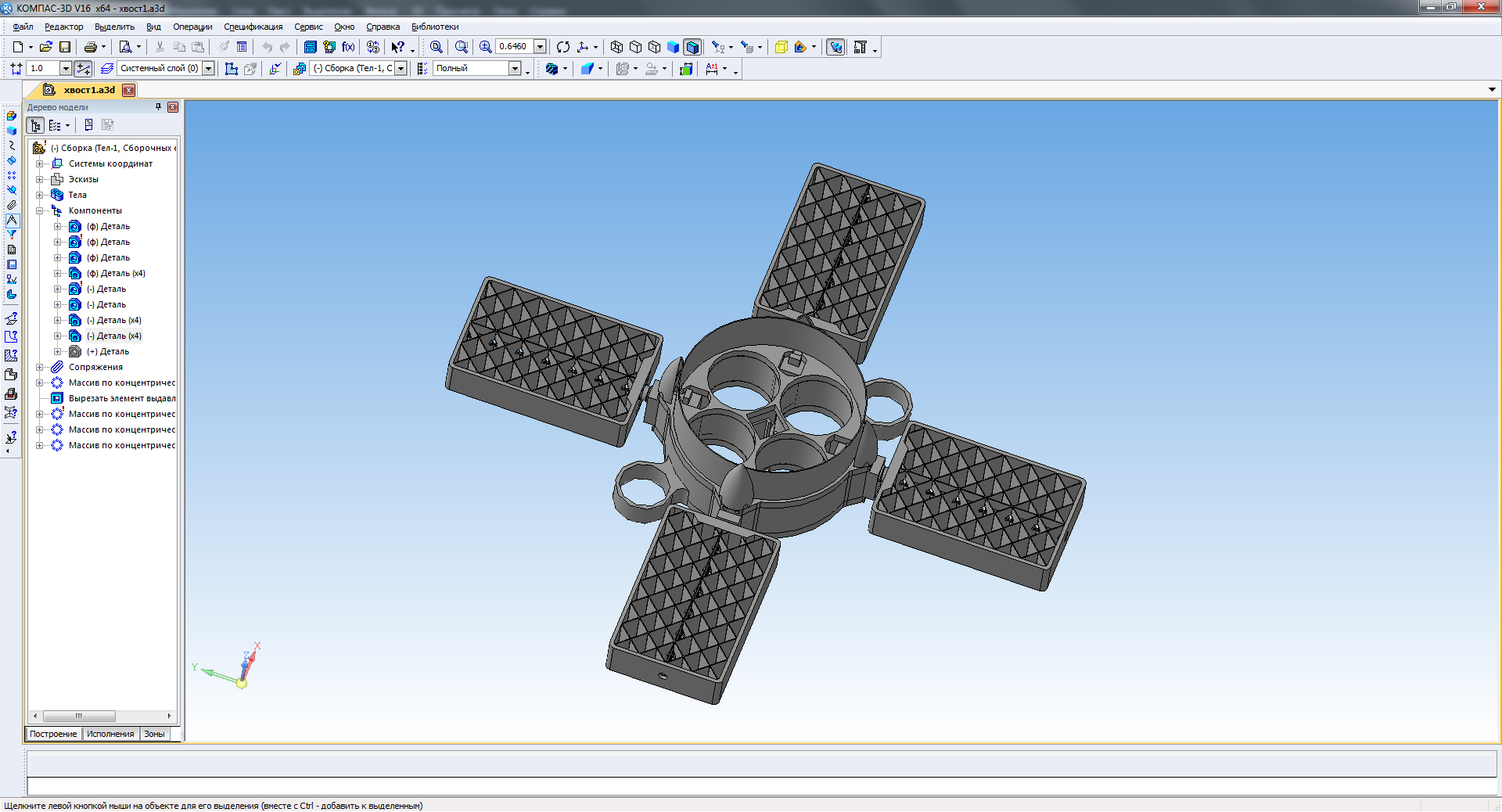
Распечатанные рули:
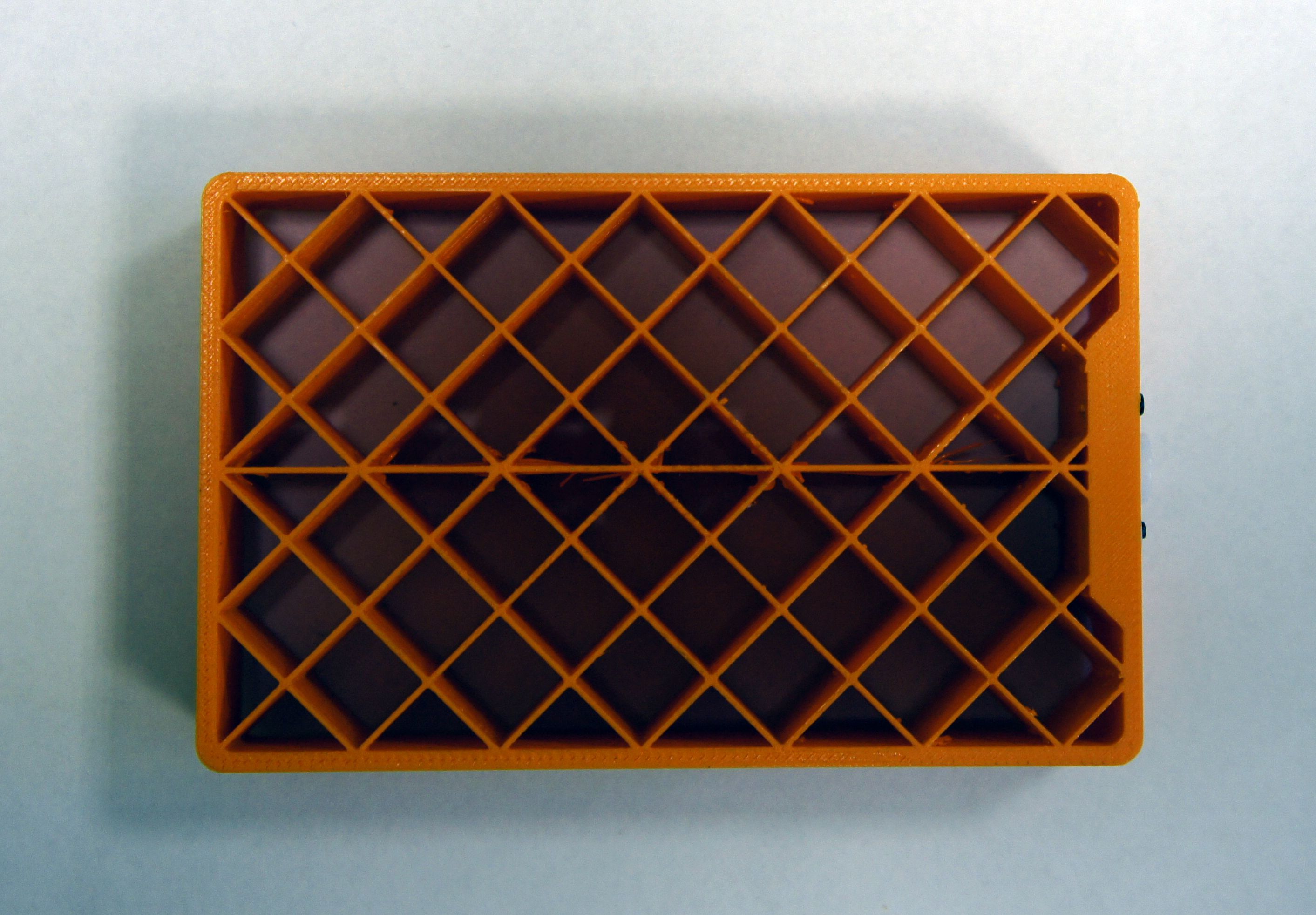

Руль с закрепленной на нем качалкой для крепления к рулевым машинкам:
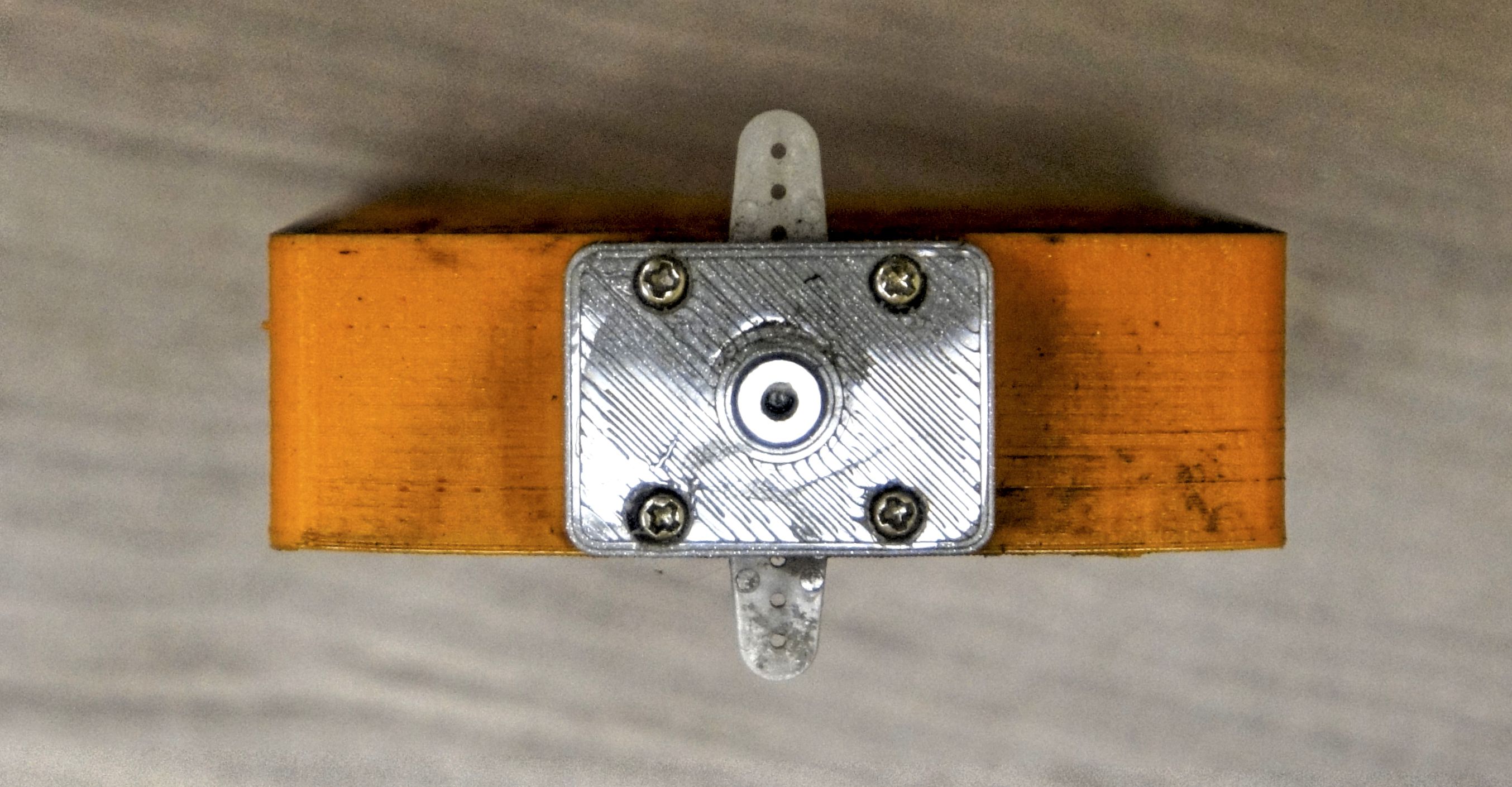
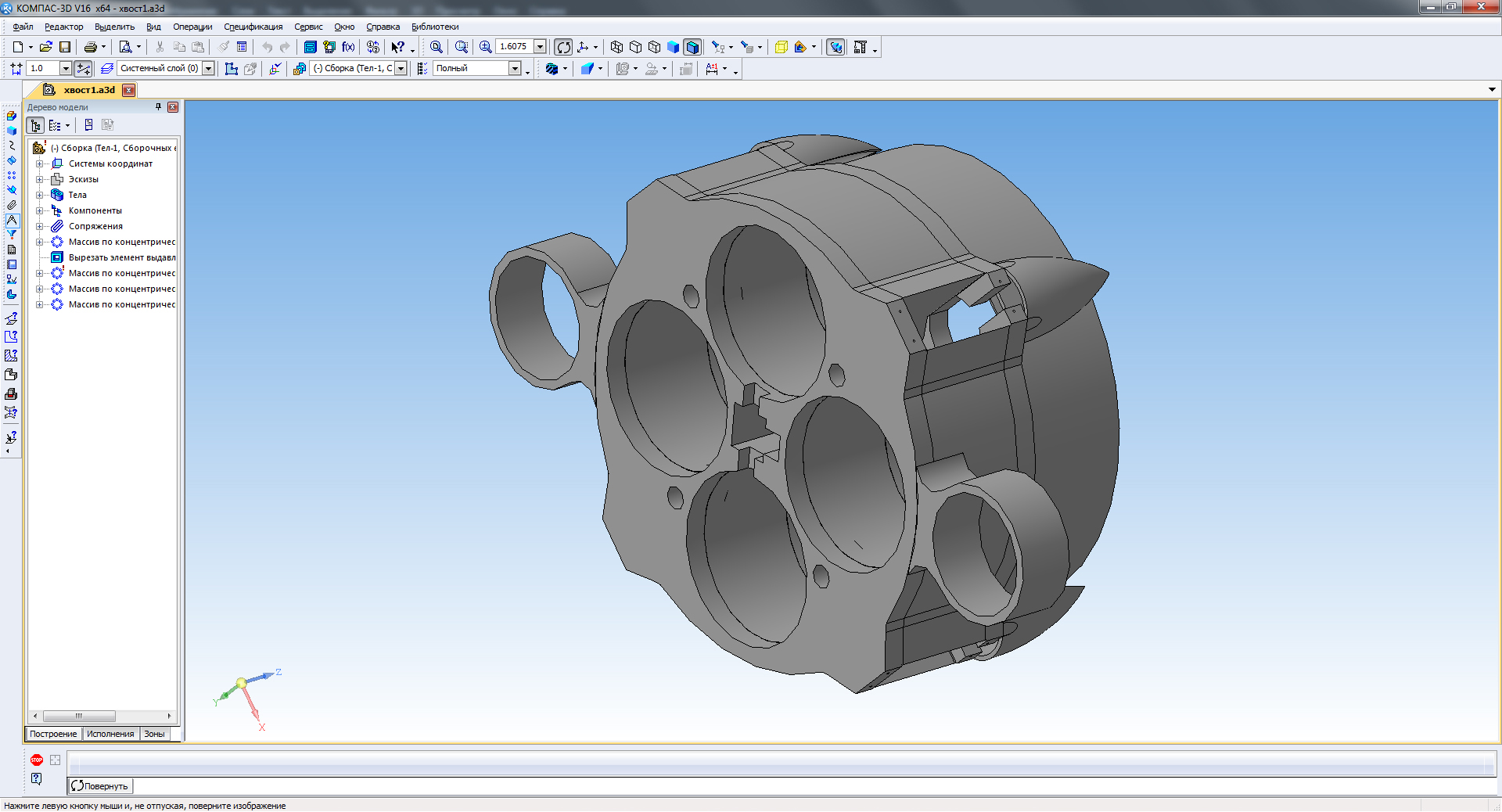
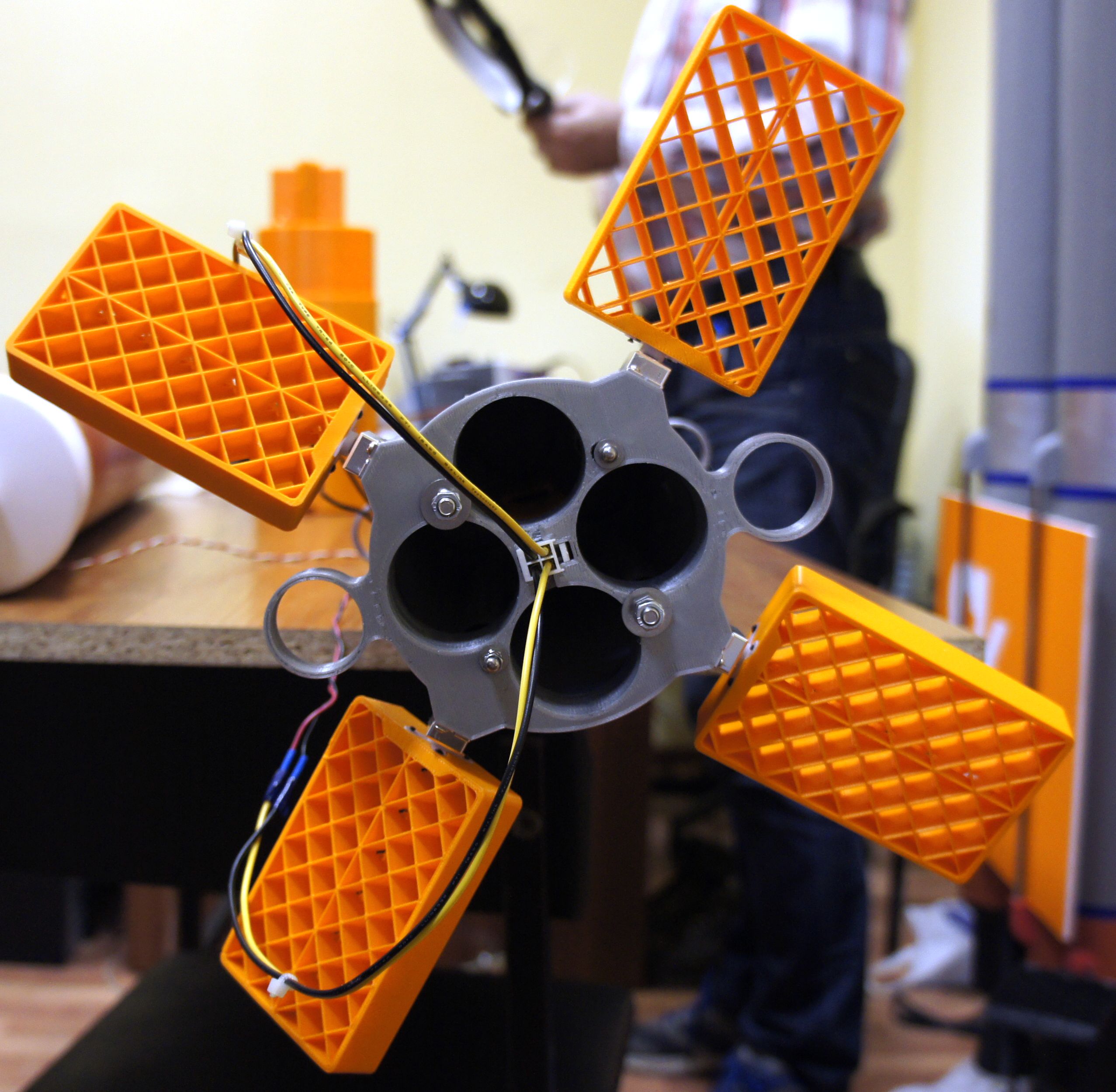
В торцевом шпангоуте серого цвета имеются отверстия под РДТТ производства компании Real Rockets полным импульсом 300 Н*с каждый, полости под рулевые машинки, а также два кольца для направляющих. К приводам рулевых машинок крепятся рули оранжевого цвета. В центре шпангоута располагается разъем для подключения запалов тех РДТТ, которые должны включиться в полете.
Крепление торцевого шпангоута к хвостовой части ракеты (провода идут вверх по корпусу):
Хвостовая часть (вид сверху):
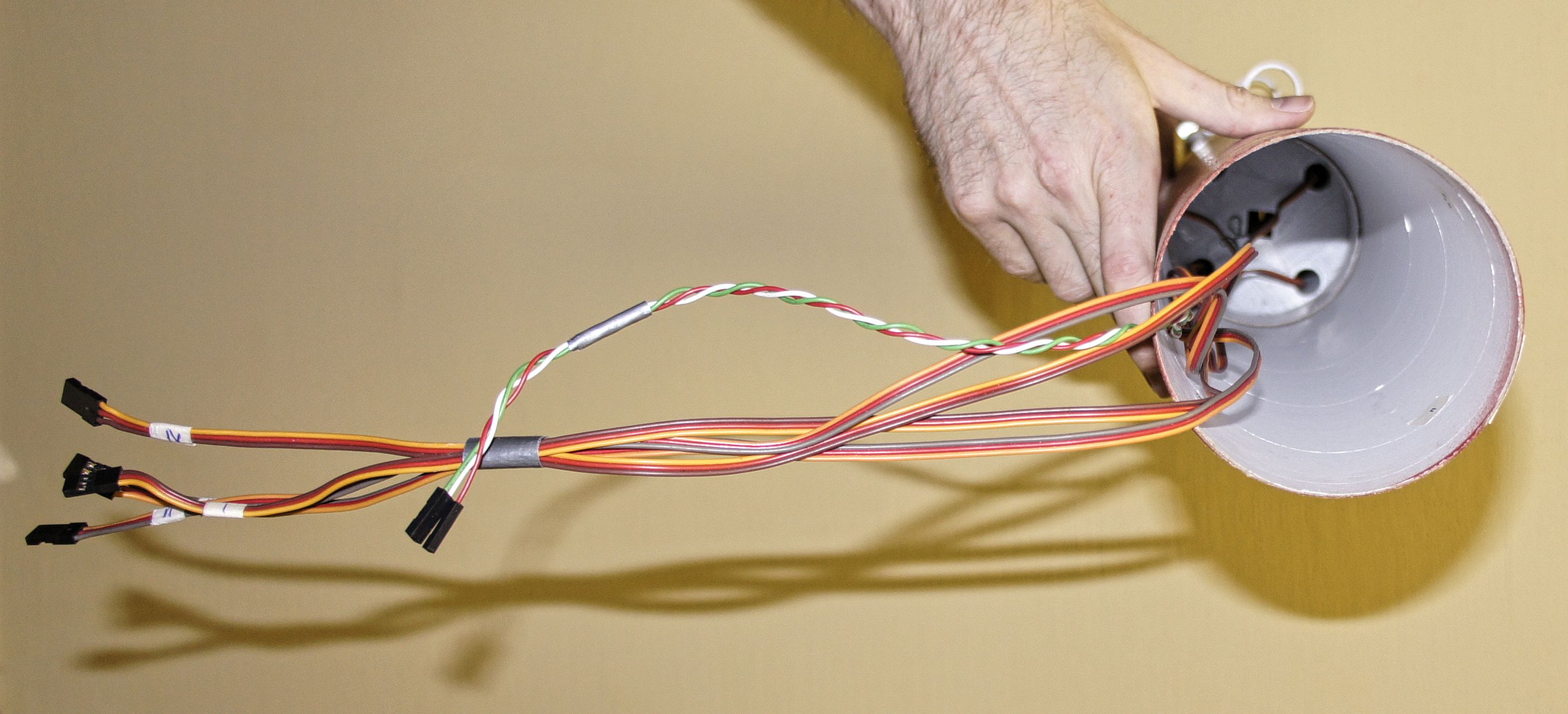
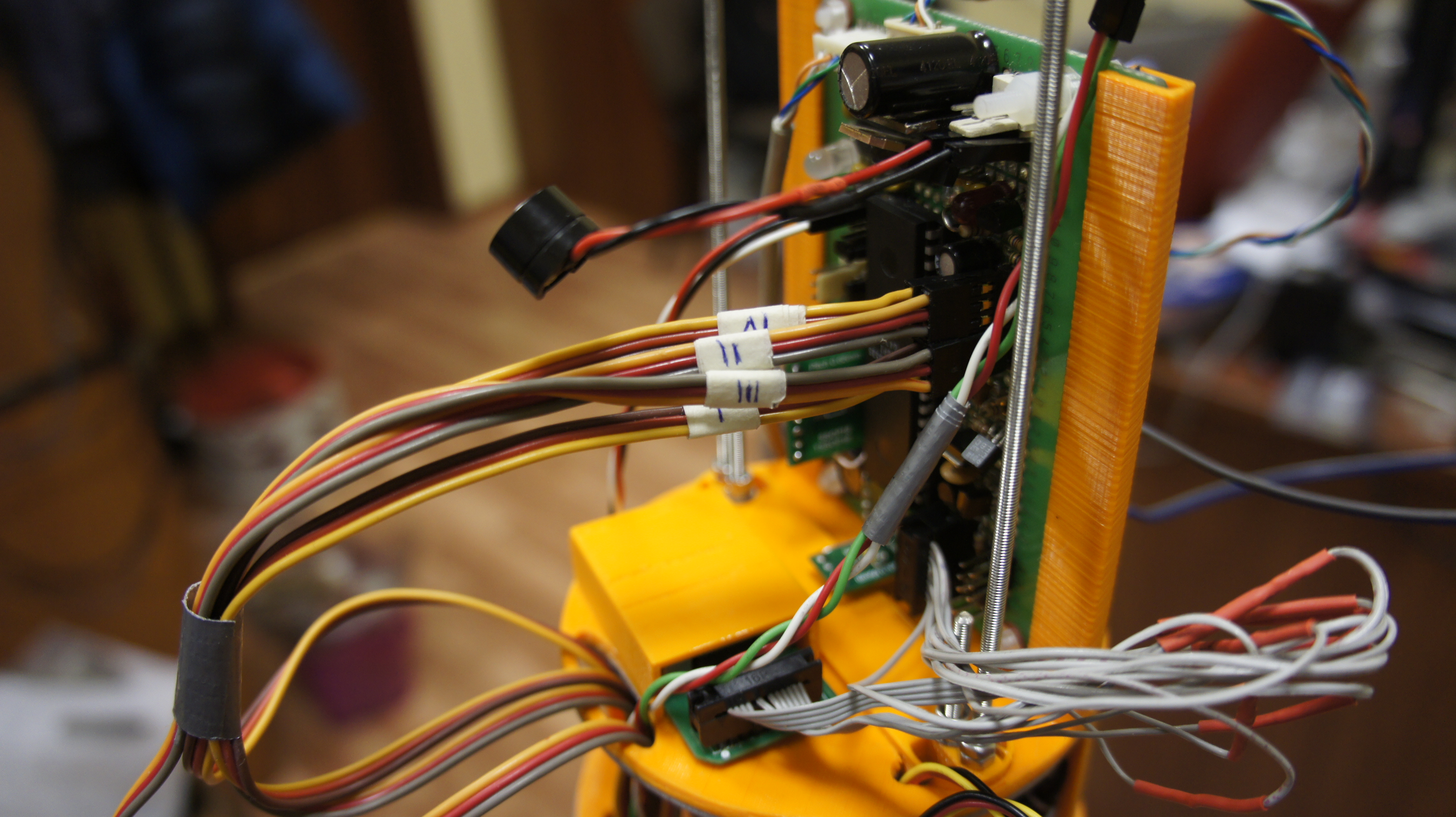
Кабели от рулевых машинок выведены на верх хвостового отсека и пронумерованы. Они будут вставлены в соответствующие разъемы на плате СУ (будет проиллюстрировано далее).
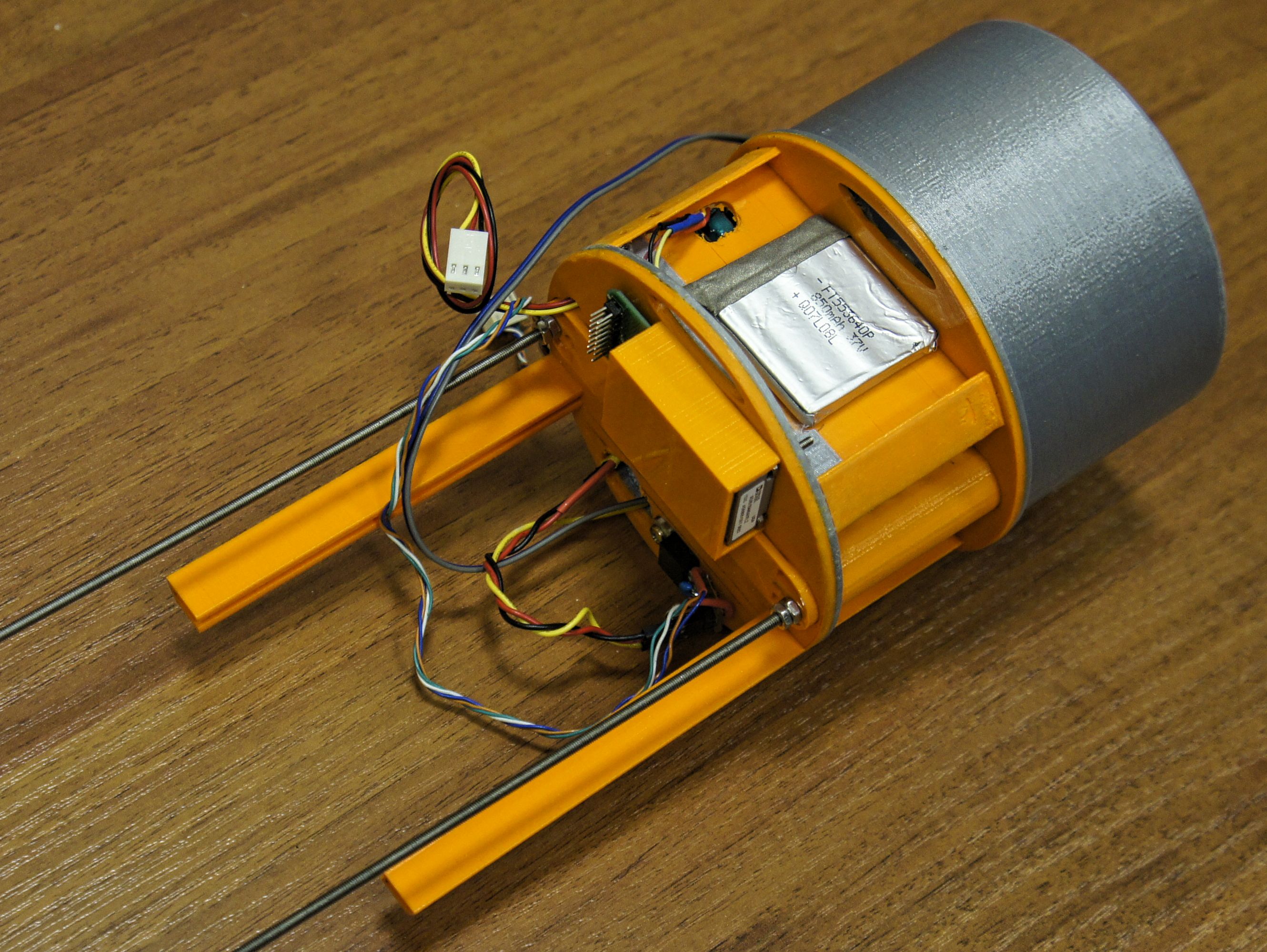
Отсек СУ
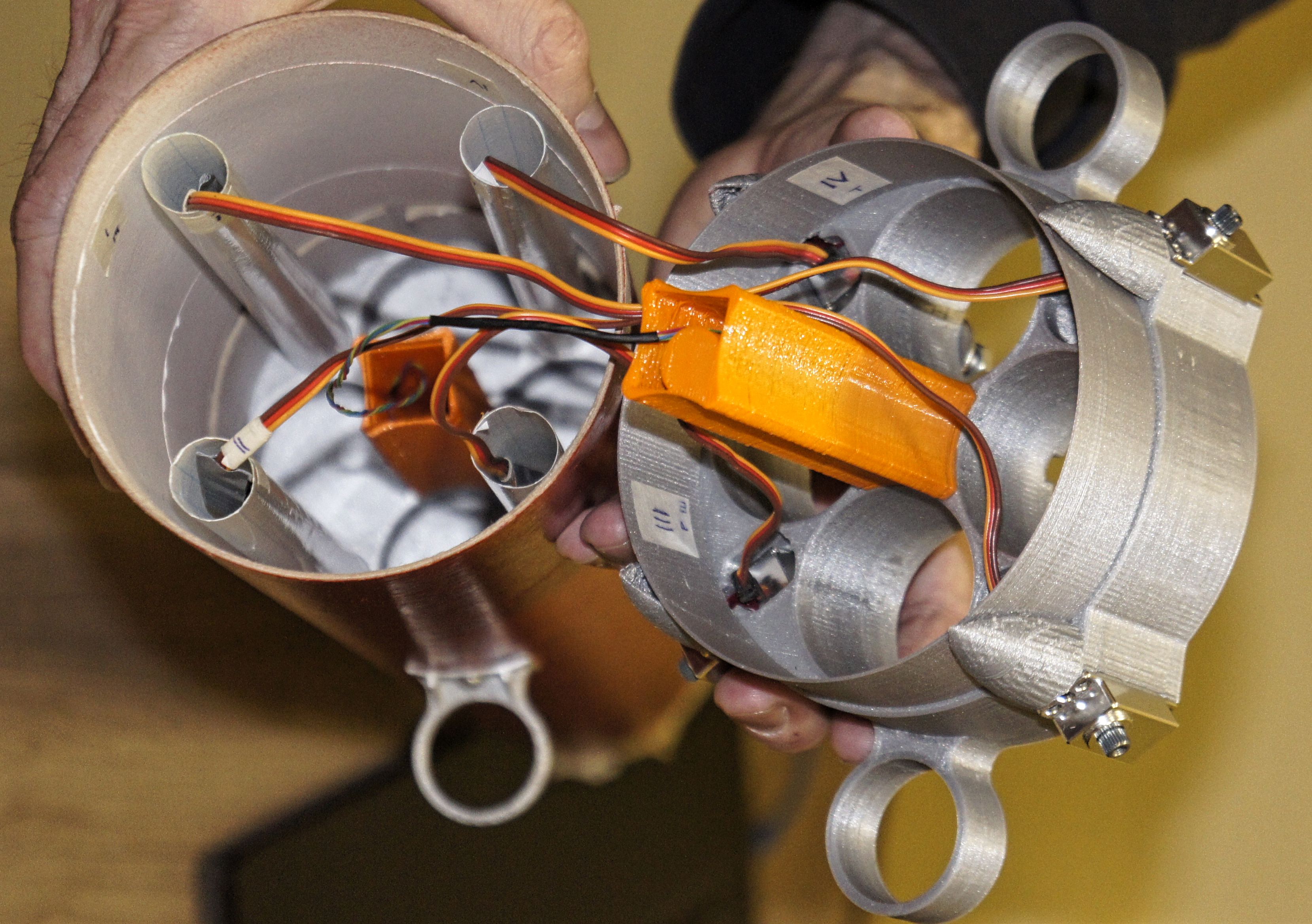
Отсек СУ с продетыми сквозь него металлическими шпильками вставляется в хвостовую часть ракеты стороной серого цвета.
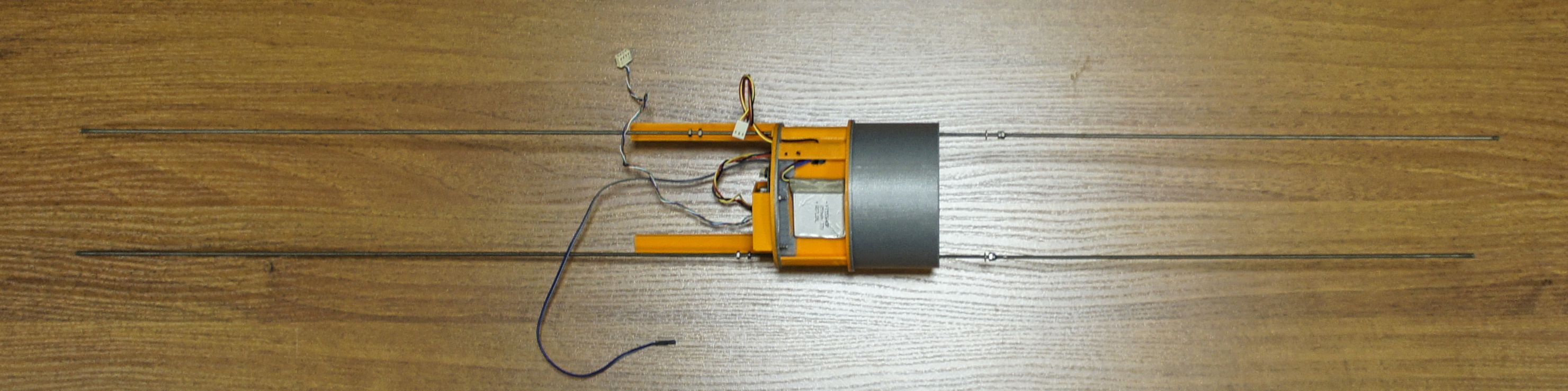
В середине отсека — место под аккумуляторные батареи. В верхней части — рельсы для фиксации основной платы СУ.
В рельсы вставляется основная плата СУ.
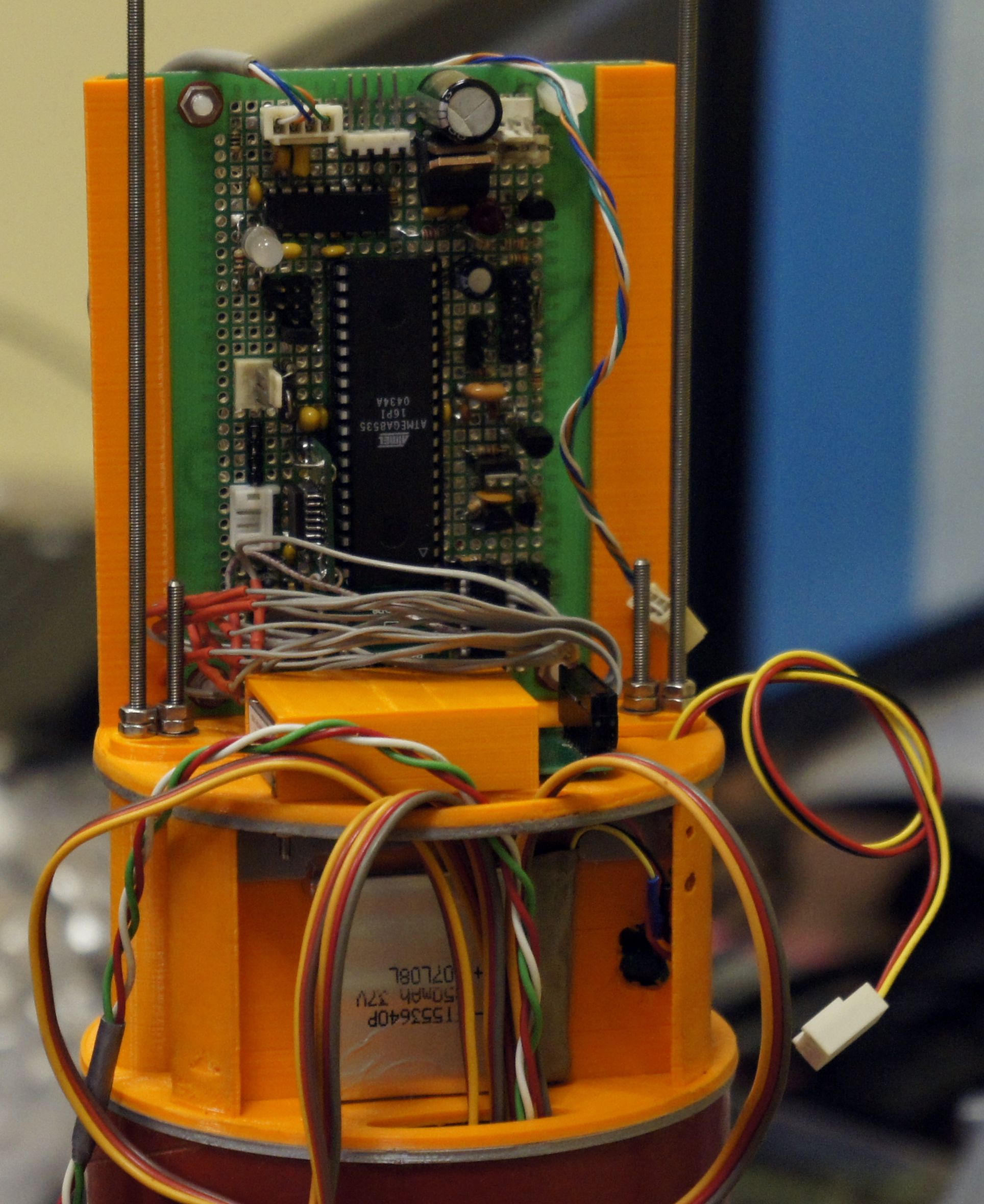
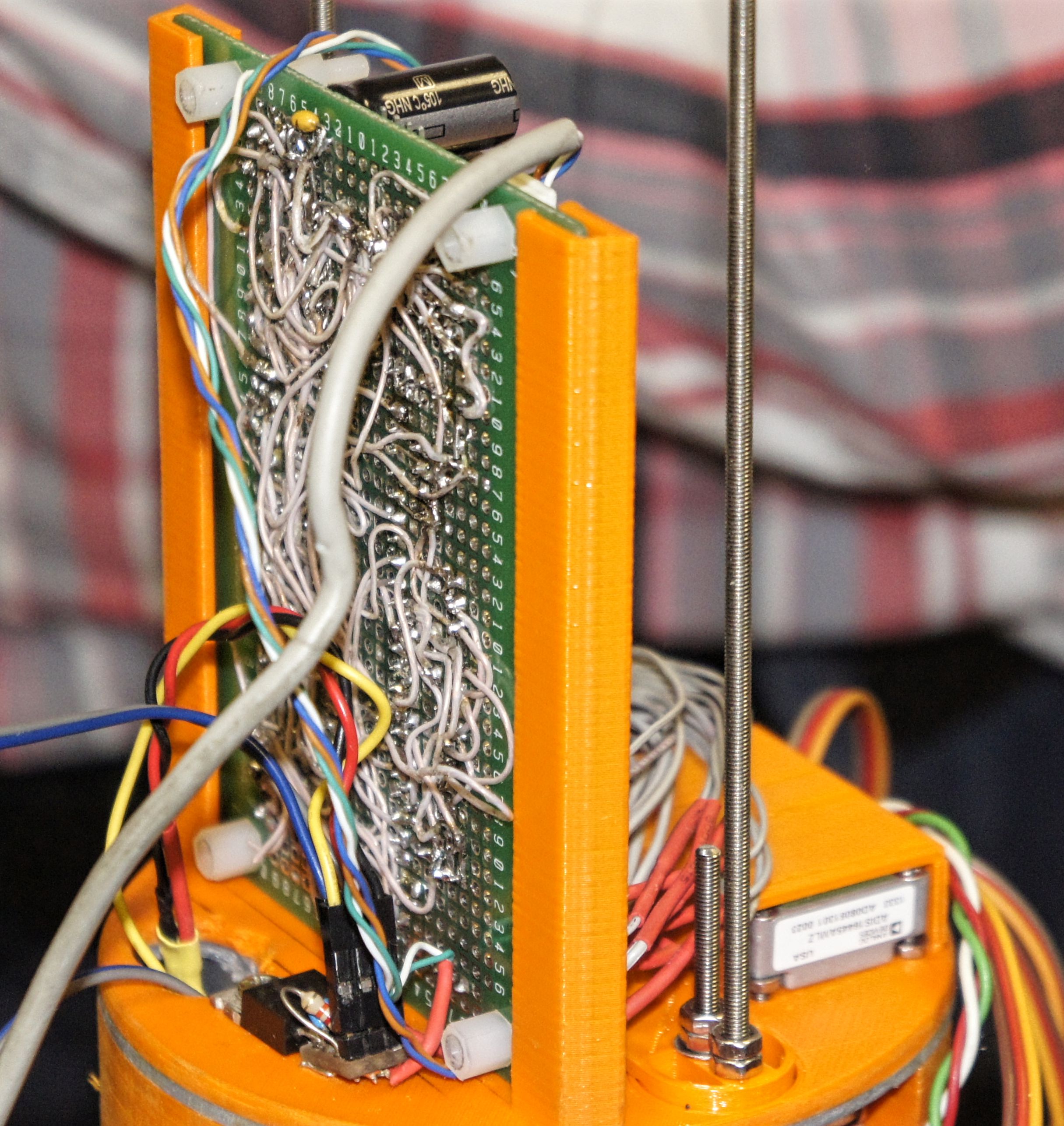
К плате СУ подключаются кабели, идущие снизу от запалов. Кабели пронумерованы:
СУ на новом «летающем стенде» также отличается от той, что летала на предыдущих ракетах.
Она выполнена на новом контроллере (ATmega8535 вместо ATmega8). Соответственно, под новый контроллер модифицирован код. В новом коде — другие алгоритмы преобразования сигналов (поскольку СУ управляет уже не напрямую электромоторами поворота рулей, а сервомашинками через их собственную электронику), причем старый участок кода, умеющий управлять моторами напрямую, выброшен. Также обновленная программа может выбрасывать парашют, записывать телеметрию во флеш-память и контролировать исправность СУ. Новая система управляет ракетой по всем трем осям координат.
Принципиальная схема СУ:
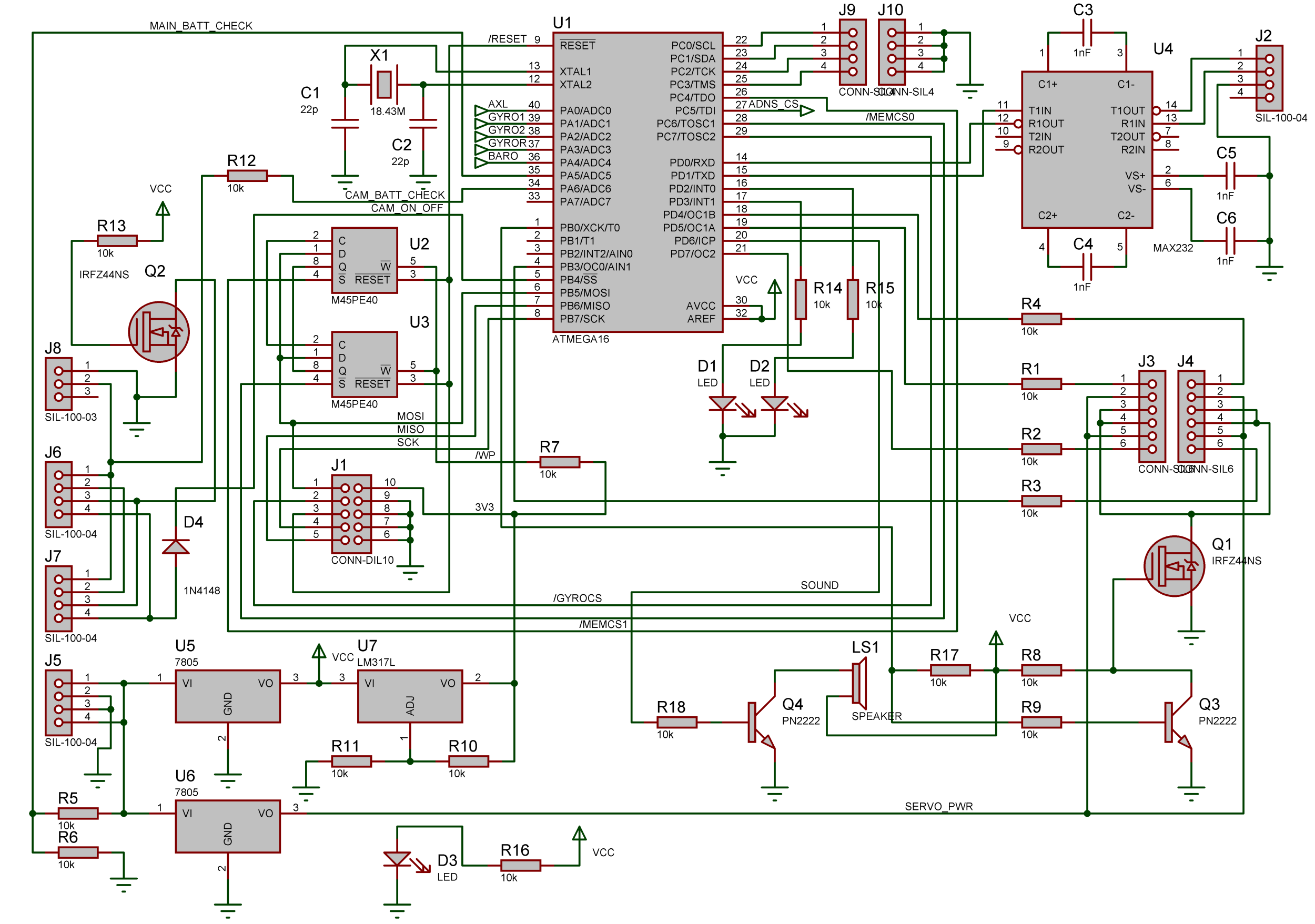
Примечание: на схеме нет датчиков (барометра, внешнего акселерометра, внешнего гироскопа) и микросхемы ADIS16445 (трехосный MEMS-гироскоп + трехосный акселерометр); контроллер помечен как ATMEGA16 — данная микросхема использовалась в ранних версиях СУ, совпадает по выводам с ATmega8535
Передняя часть с крышкой отсека СУ
В передней части ракеты носовой оживальный обтекатель (оранжевого цвета) с привязанным к нему парашютом, который выбрасывается подрывом пирозаряда (пирозаряд подрывается по команде СУ).

На фото выше передняя часть, к которой пристыкована крышка отсека СУ (оранжевый цилиндр с камерами на внешней поверхности).
Помимо того, что крышка закрывает отсек СУ и несет на внешней поверхности камеры, на верхней части крышки располагается ряд приборов (на фото выше верхняя часть не видна, так как скрыта корпусом красного цвета).
На фото ниже — крышка крупно без видеокамер (верхняя часть крышки, на которой штатно расположены AltimeterThree, GPS-трекер, блок Arduino):
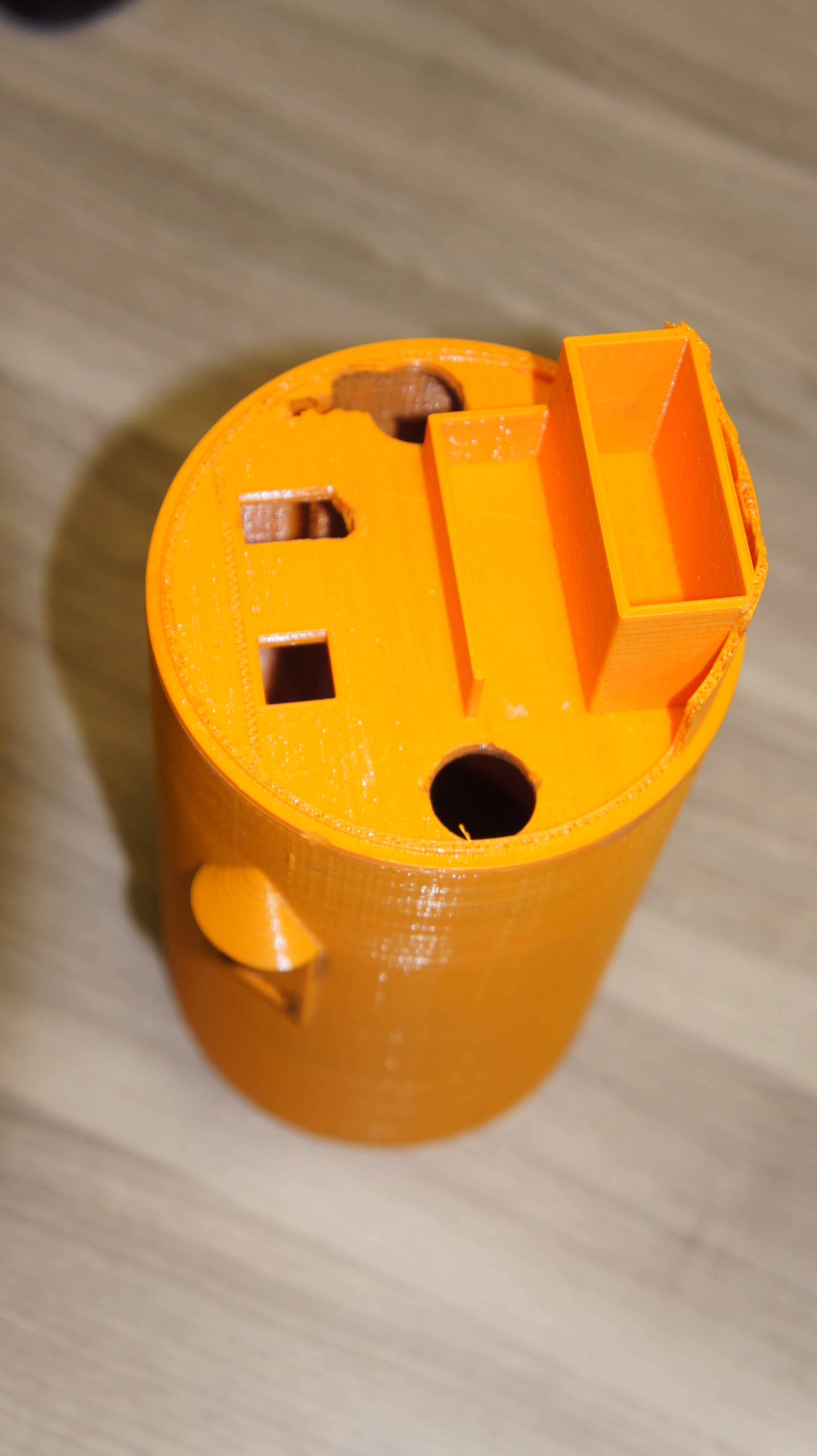
Список оборудования, расположенного на крышке:
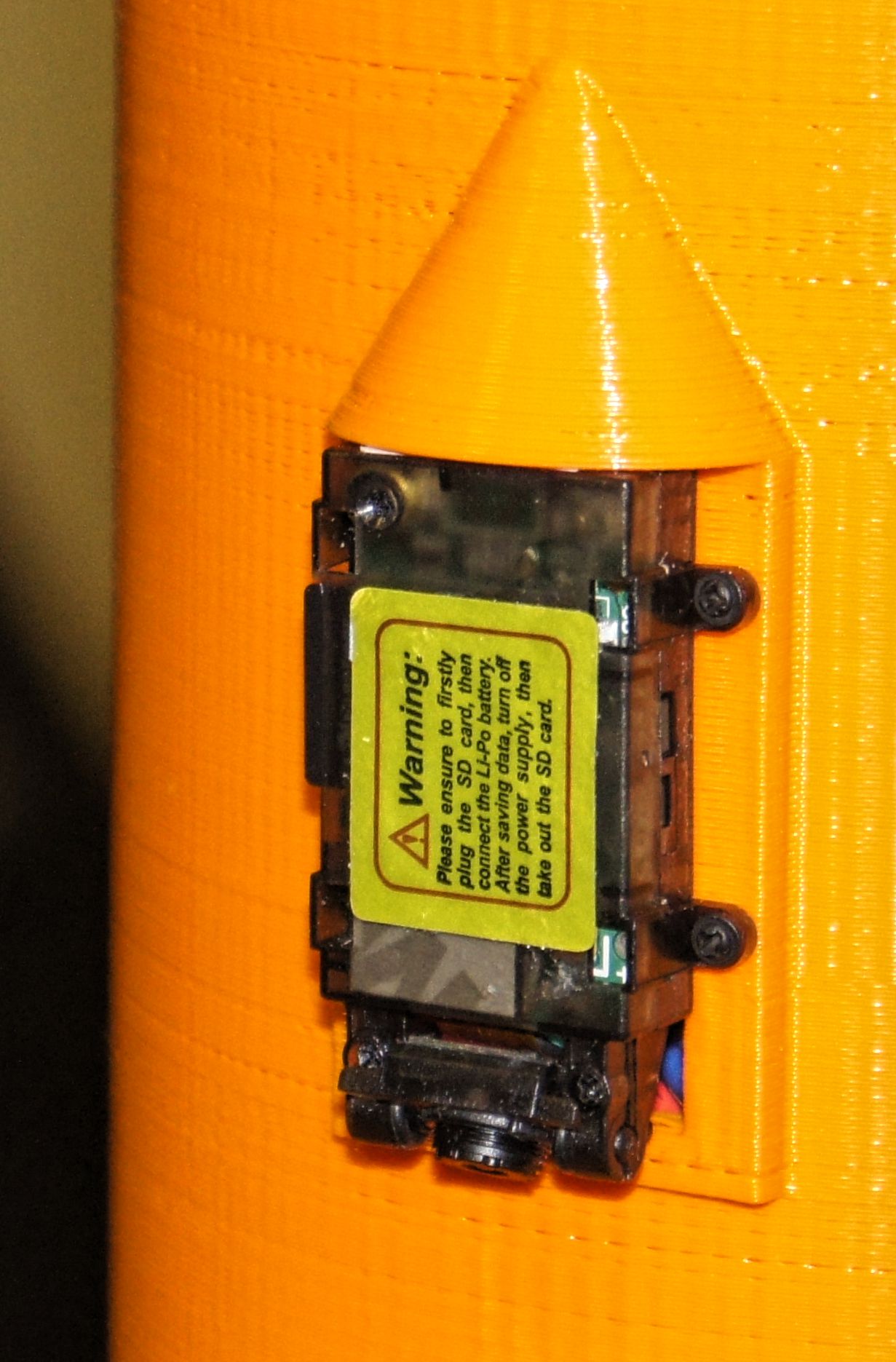
- две видеокамеры, которые питаются от собственного аккумулятора, но управляются СУ (снаружи);
- GPS-трекер Xexun TK102-1, который может сбрасывать собственные координаты по SMS;
- прибор AltimeterThree фирмы Jolly Logic, который включает в себя барометрический высотомер и трехосный акселерометр — он нужен, чтобы проконтролировать правильность показаний датчиков нашей СУ;
- электронный блок на базе Arduino, который может сбрасывать данные GPS по Wi-Fi.
Видеокамера крупно (вторая видеокамера расположена симметрично):
Общий вид ракеты на стартовой установке:
