Ракеты с системой управления совершили три полета
В конце апреля наша компания запустила три тестовые ракеты («летающие стенды») для отработки прототипа системы управления (СУ) орбитальной ракеты-носителя. И вот как это выглядело.
Разберем запуски подробно.
23 апреля 2016 года мы запустили ракету с СУ, разработанной внешним разработчиком на Arduino на основе идей нашего главного конструктора по системам управления Андрея Суворова. С практической точки зрения она отличалась тем, что ракетные двигатели на старте запускались не с проводного пульта, а по Wi-Fi.
Ракету снарядили четырьмя твердотопливными двигателями РД1М-300-0 производства российской компании Real Rockets.
Параметры двигателя:
- полный импульс — 300 Н•с;
- максимальная тяга — 190 Н;
- средняя тяга — 120 Н;
- время работы — 2,5 с (вышибного заряда нет).
От предыдущей модификации они отличаются чуть большей длиной, полным импульсом и тягой и более коротким и стабильным временем выхода на режим.
Модификации пошли двигателям на пользу — в отличие от предыдущего полета первая пара двигателей запустилась по команде практически одновременно.
Напомним, что для увеличения времени полета ракеты два двигателя запускаются на земле и еще два — после того, как первая пара отработает.
Пару секунд ракета устойчиво поднималась. Затем взорвался один из двигателей. Он именно взорвался: позже мы нашли на земле все обломки, в том числе части бракованного двигателя, по которым хорошо видно, что это был не прогар в какой-то одной точке, а разрыв всего корпуса.
Хвостовой отсек начал разрушаться, но в доли секунды до разрушения система управления зафиксировала падение тяги, которое произошло из-за взрыва мотора, посчитала, что двигатели штатно закончили работу, и запустила оставшиеся два двигателя. Затем хвостовой отсек разрушился, питание СУ отключилось, а только моторы в лучших традициях ракетной кинохроники разлетелись по небу, оставляя белые следы.

Данные из СУ удалось извлечь, так как флешка при взрыве и падении не пострадала.
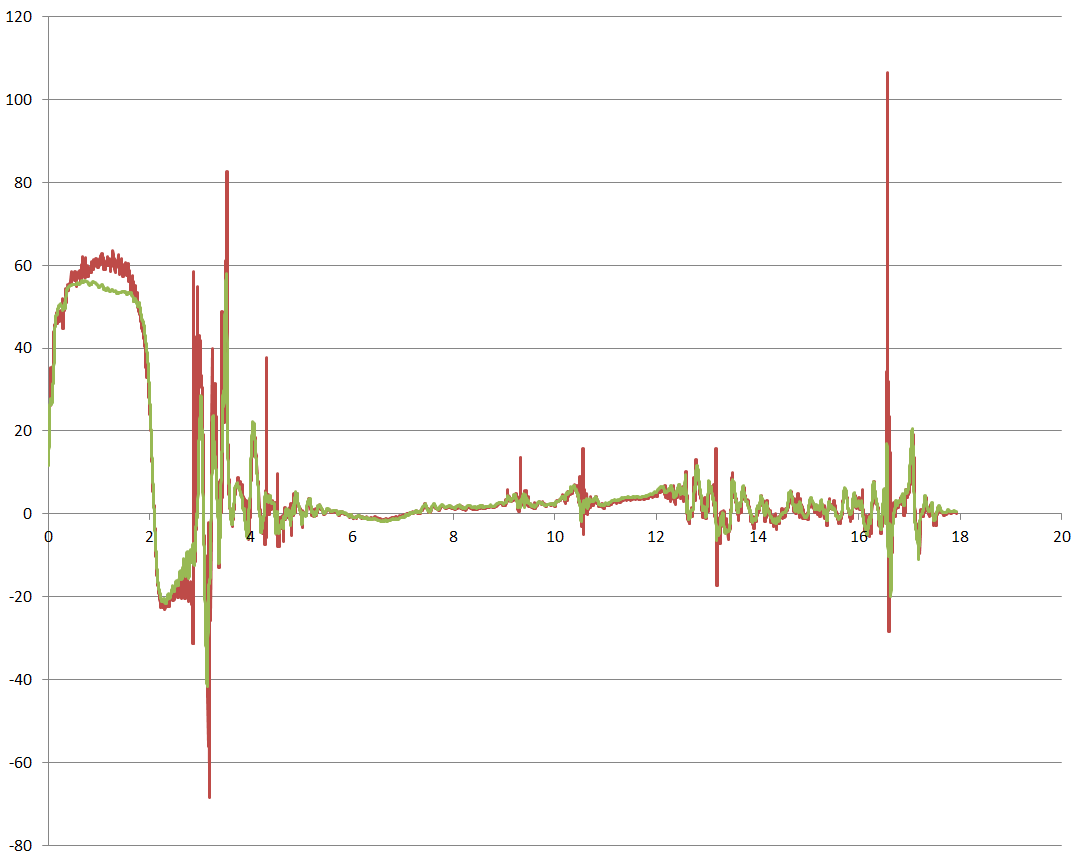
На графике красным показан угол поворота ракеты по тангажу (качание ракеты), а синим — рысканью (качание ракеты в другой плоскости). Чтобы не запутаться в осях, см. нашу памятку.
{kind=link}
Угол поворота по оси тангажа/рысканья, градусы
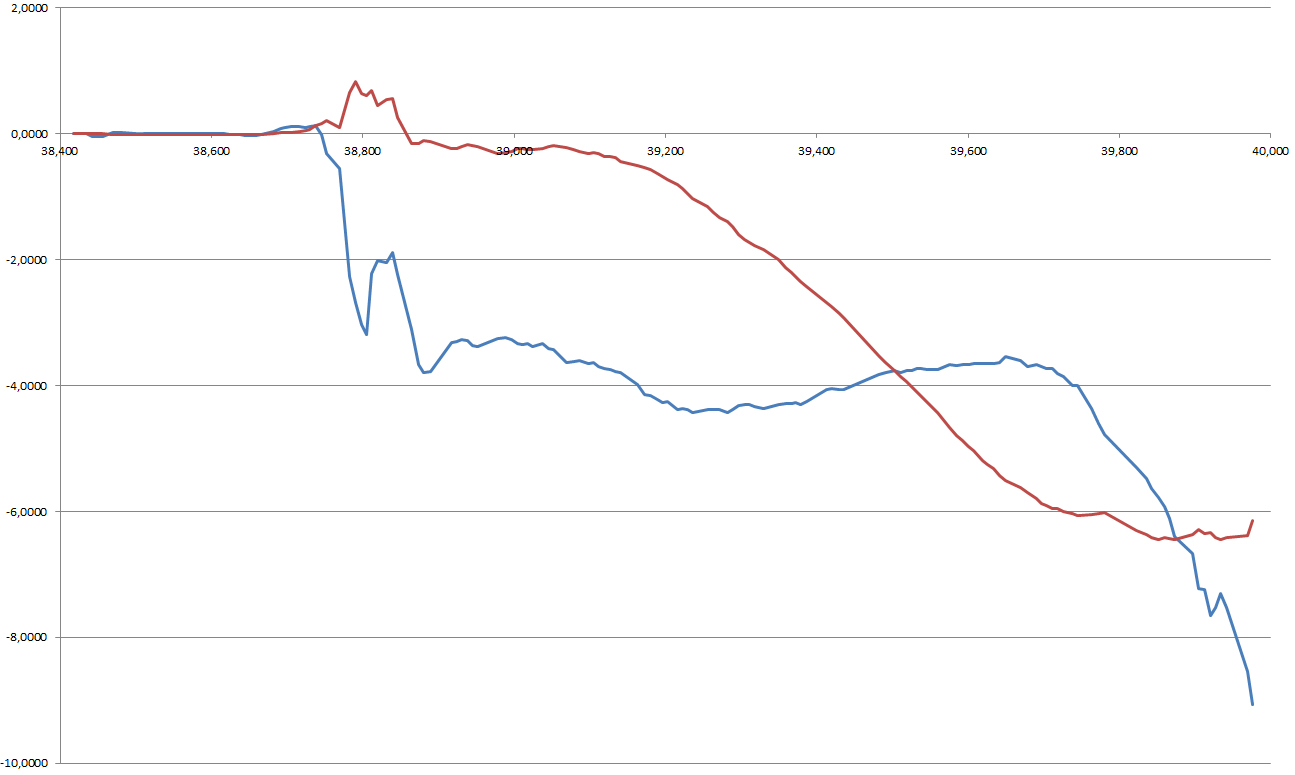
Время полета, с
В момент времени Т+38,8 с ракета сходит с направляющей и начинает заваливаться — на красном графике никакого результата управления не прослеживается. Скорее всего, не хватает или набегающего потока, или углов отклонения рулей. На синем графике видны колебания, но возможно, что они отражают статическую устойчивость ракеты, а не работу СУ. В момент времени Т+39,7 с происходит взрыв (синий график резко идет вниз).
Ниже — отдельный график по крену (углу повороту ракеты вокруг продольной оси).
Угол поворота по оси крена, градусы
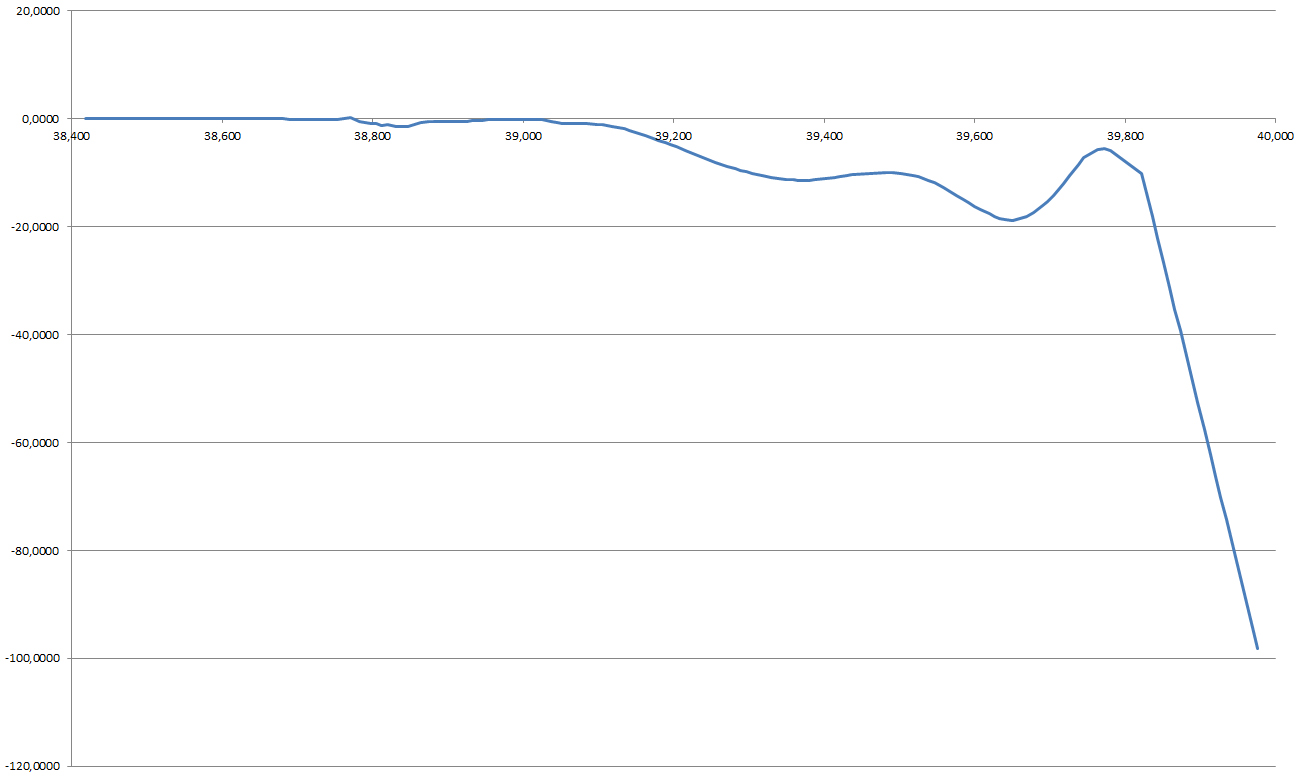
Время полета, с
На этом графике видно, что СУ пыталась повернуть ракету в исходное состояние. По крену она действовала успешнее, чем по другим осям, видимо, потому, что по этой оси достаточно небольших воздействий для управления ракетой. Эта информация использовалась при настройке СУ следующих летающих стендов.
29 апреля мы запустили еще две ракеты, СУ которых была полностью разработана и создана внутри «Лин Индастриал».
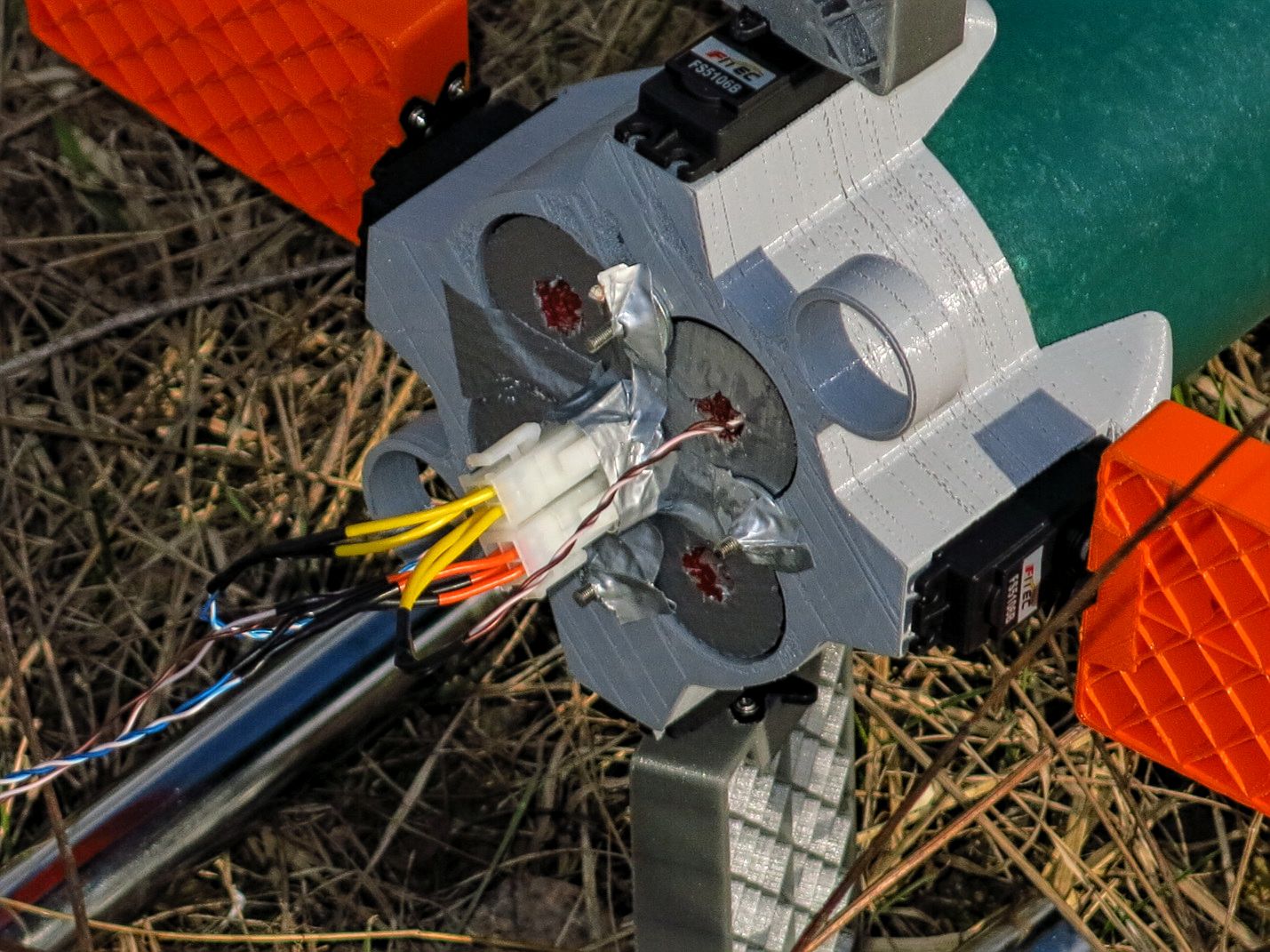
Первой стартовала ракета, которая, как и ракета с Arduino, была заряжена четырьмя двигателями. Внешне она отличается приборным отсеком серого цвета.

К сожалению, в полете проявилась чисто алгоритмическая ошибка. При транспортировке рули неизбежно поворачиваются, поэтому перед полетом мы вручную выставляем их в ноль, то есть параллельно земле. На рулях мы не отмечали, где у них верх и низ, а в этот раз во время перевозки рули повернулись слишком сильно — невозможно было понять, какая из сторон верхняя, а какая нижняя. В результате рули были выставлены ровно, но неправильно — не в 0, а на 180 градусов. Ракета в начале полета стала выставлять их в ноль и повернула рули, что привело к закрутке, большой перегрузке и разрушении ракеты примерно на третьей секунде полета.

Видно, что два руля стоят почти вертикально — кадр сделан в тот момент, когда СУ поворачивала рули из положения 180 градусов в 0 градусов
Эту ошибку можно исправить двумя способами:
- пометить верх и низ рулей;
- выставлять рули в ноль не после начала подъема, а до — сразу после калибровки гироскопа (как это сделано в ракете на Arduino).
На графике ниже — высота подъема ракеты по датчику давления.
Высота, м
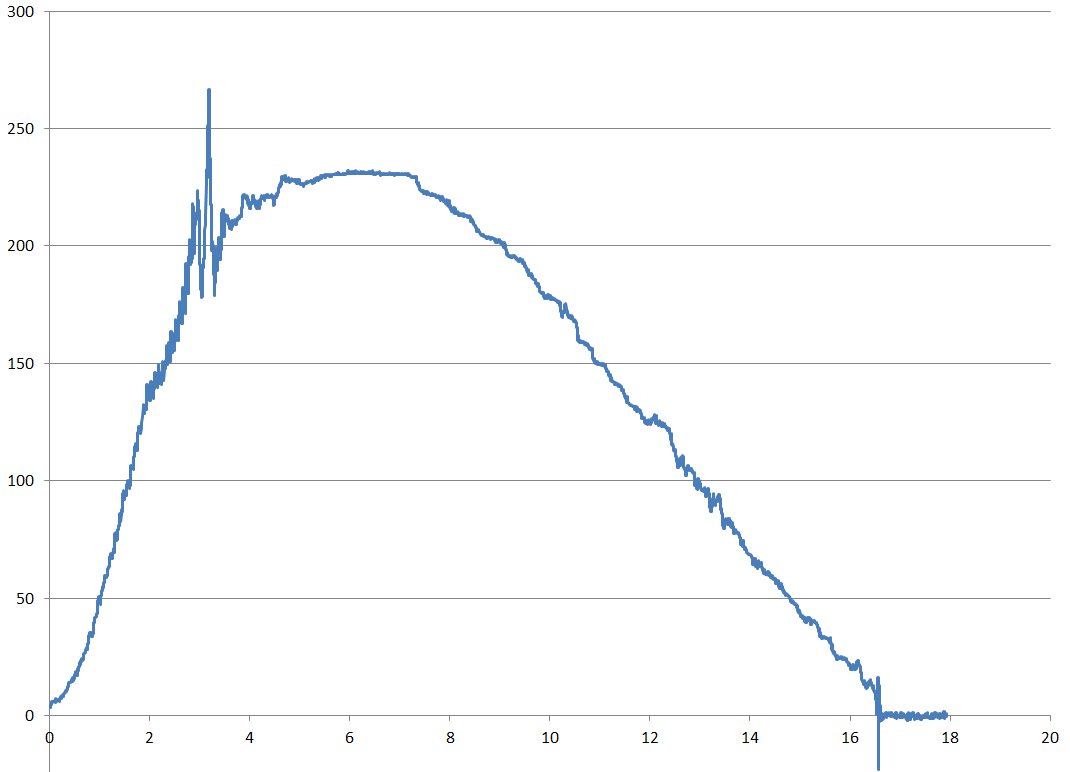
Время, с
Мощные возмущения на третьей секунде совпадают по времени с моментом разрушения ракеты. Вторая пара двигателей не запустилась, а запал парашюта не сработал, что, видимо, было вызвано обрывом контактов между СУ и запалами.
Однако ракета продолжила подъем и достигла высоты около 228 метров на 6-й секунде полета. Полет от начала движения продолжался 16,56 секунды. Ниже представлен график ускорения по продольной оси ракеты, замеренный внутренним и внешним акселерометрами.
Внутренним акселерометром мы называем акселерометр внутри микросхемы ADIS16445, входящей в состав СУ, а внешним — дополнительный акселерометр, подсоединяемый к СУ через разъем.
Ускорение по продольной оси ракеты по данным бортовых акселерометров (внешний, внутренний), м/c2
Время полета, с
В целом показания совпадают, но поскольку у внутреннего акселерометра предел чувствительности составляет 5,25g (51,5 м/c2), а у внешнего — 16g (157 м/c2), то в моменты пиковых ускорений (например, работа двигателей на первой секунде полета или удар о землю на 16-й) внутренний датчик зашкаливало, и приходилось полагаться на внешний.
Однако полет принес и положительные результаты.
Во-первых, достоверно обнаружен недокументированный эффект используемого нами MEMS-гироскопа — ускорение по оси Z влияет на показания датчика температуры. Влияние мало — около 0,12 градуса/g, поэтому на испытаниях в офисе оно не было обнаружено. Для полетов «летающих стендов» этим эффектом можно пренебречь, но в космической ракете его надо будет учитывать.
Во-вторых, удалось получить данные для корректировки управляющих коэффициентов для рулей (проще говоря, понять зависимость момента, который дают решетчатые рули, от скорости набегающего потока воздуха и от угла поворота руля). Это сделает управление в следующих полетах быстрее и точнее, а полет — стабильнее.
Чтобы понять, как вычислить коэффициенты, посмотрим на график ниже.
Эффективность рулей по крену, радиан/(Па•с2)
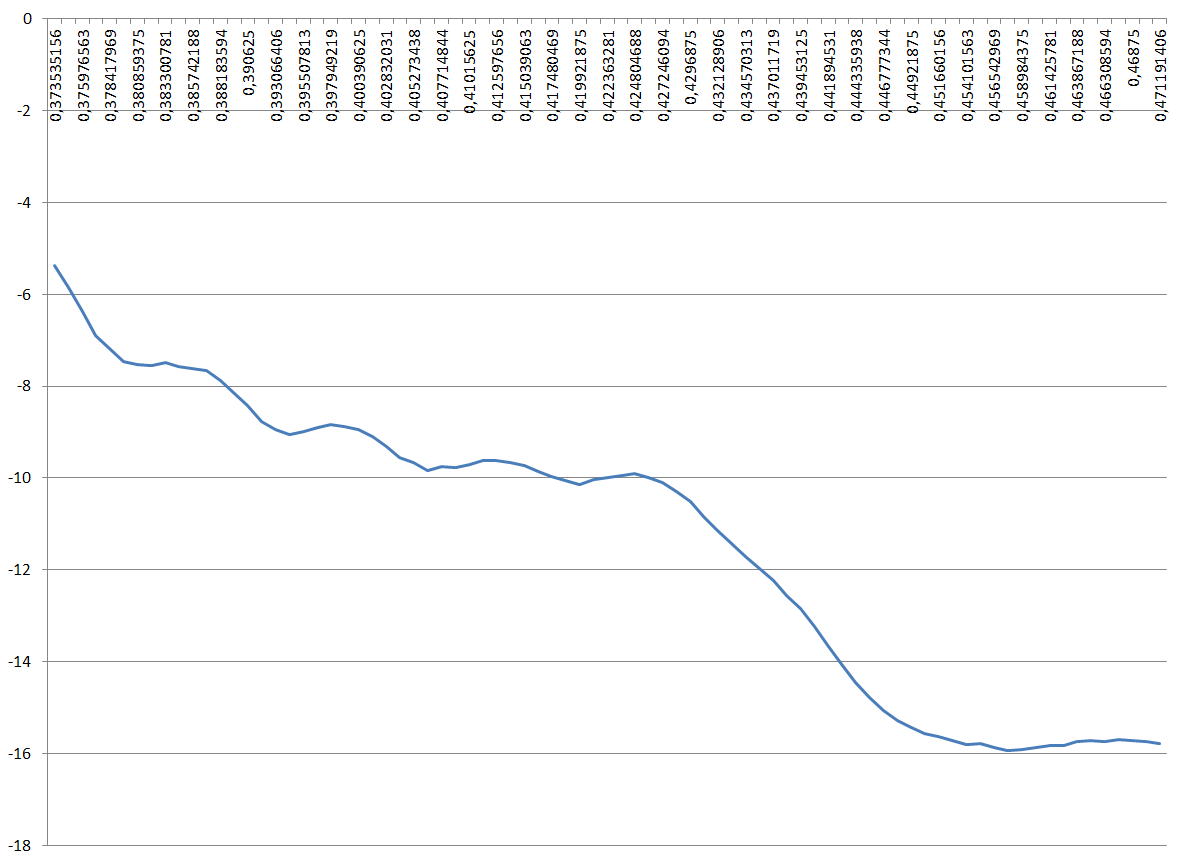
Время полета, с
На графике приведено угловое ускорение вдоль продольной оси ракеты, деленное на скоростной напор, за тот короткий период времени, когда ракета уже сошла с направляющей, но гироскоп по крену еще не зашкалило. Если определить момент инерции ракеты и среднее плечо рулей, то можно рассчитать управляющий момент, которые создают рули по всем трем осям. Расчеты показали, что величина управляющего воздействия на руль по модулю равна 10 Н при скорости 17 м/c и отклонении руля на 40 градусов (критический угол атаки решетчатого руля — после превышения 40 градусов сила не растет, а падает). По результатам расчетов мы уменьшим управляющие коэффициенты по тангажу и рысканью в 2 раза, а по крену — в 4.
Момент инерции ракеты мы определяли, создав ее модель в программе КОМПАС-3D.
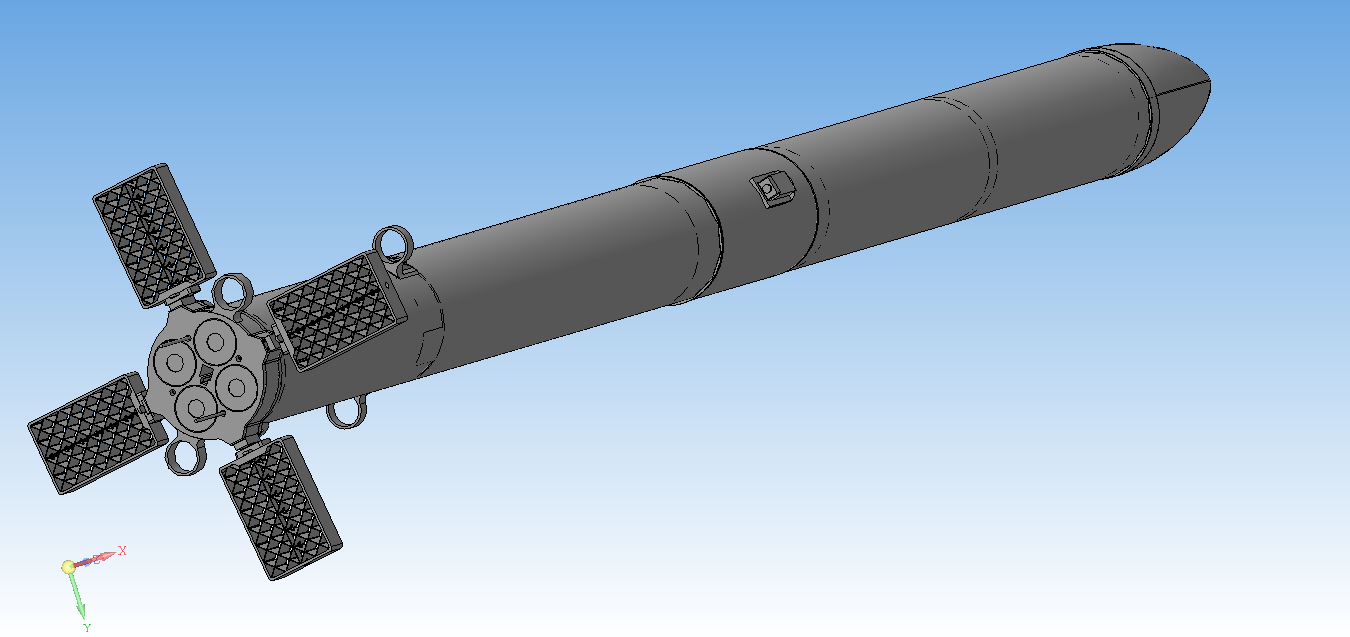
3D-модель испытательной ракеты
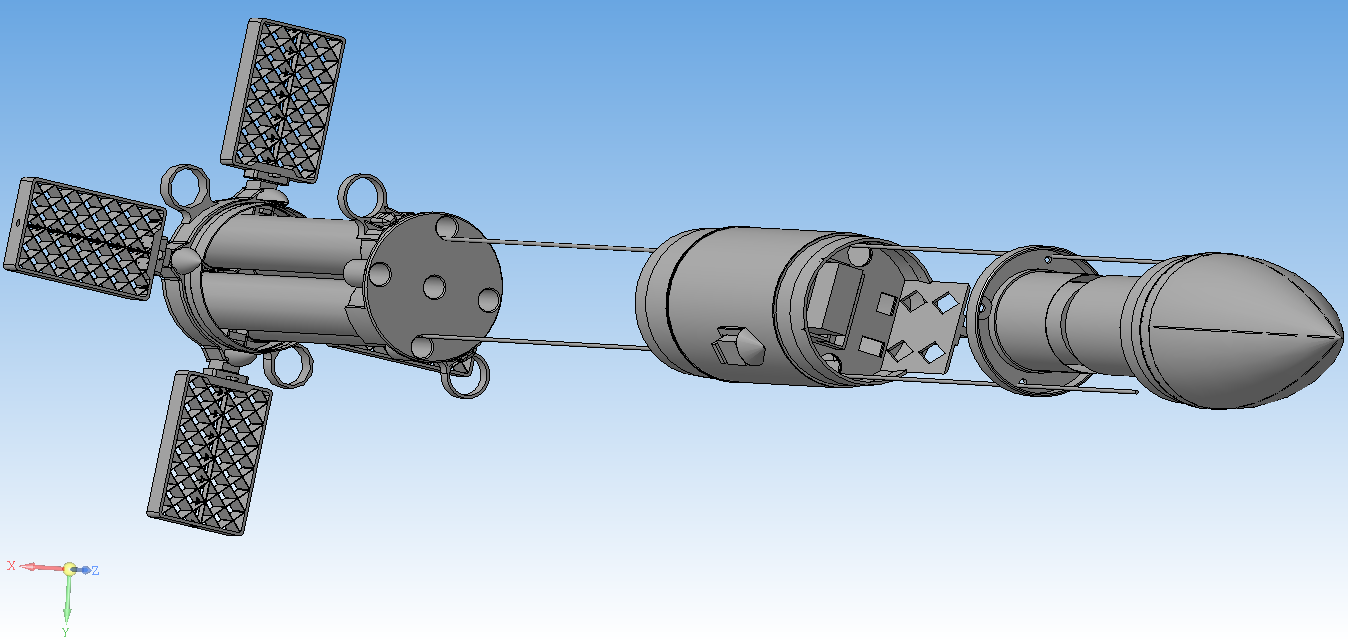
3D-модель испытательной ракеты (вид с «прозрачным» корпусом)
Наконец, третий «летающий стенд» мы запустили только на двух двигателях (визуально он отличался оранжевым приборным отсеком).

Во время полета ракеты были заметны маневры по тангажу и рысканью. Вероятно, она попыталась парировать ветер. К сожалению, система управления по пока неясным причинам оказалась поврежденной и вместо нормальных данных записала непонятный массив информации.
По итогам трех пусков можно сделать вывод, что в начале работы мы оценивали время доводки системы управления излишне оптимистично. На самом деле нужно еще 20–30 полетов, чтобы получить работающий прототип.