Начались полеты сверхзвуковой ракеты
27 мая 2016 года в Кировской области стартовала ракета СВЗ-2. Эта двухступенчатая ракета предназначена для испытания системы управления на сверхзвуковых скоростях (пока она регулярно испытывается на «дозвуке»).
Ниже краткое видео старта.
Теперь подробнее о том, зачем создавалась эта ракета и как прошел полет. Условия полета на дозвуковых и сверхзвуковых скоростях сильно отличаются, поэтому мы захотели протестировать прототип системы управления космической ракеты на сверхзвуке. Однако испытательная ракета для такого режима полета должна значительно отличаться от нашей дозвуковой ракеты.
Основное отличие — она заметно больше и состоит из двух ступеней. Во время полномасштабных испытаний первая ступень разгонит ракету примерно до 85% от скорости звука и отстрелится на высоте около полкилометра. У нее обычные плоскостные стабилизаторы (в просторечии — «плавники»). Вторая ступень разгонится до сверхзвуковой скорости. На сверхзвуковом режиме ракета будет идти около 5 секунд, причем система управления станет поворачивать решетчатые рули (расположены в самом низу ступени) так, чтобы полет шел строго вертикально. Высшая точка траектории ракеты находится на высоте около 5 км. Там откроется первый парашют, второй выбросится после снижения до 800 м.
Ниже приводим чертежи ракеты и ее отдельных частей, выполненные в программе КОМПАС-3D.
Общий вид
Двигатель первой ступени
Двигатель второй ступени
Изготовление и испытания частей ракеты шли в несколько этапов. Первоначально российская компания Real Rocket по нашему заказу построила и испытала одноступенчатую ракету СВЗ-1. Затем был испытан двигатель для второй ступени. Двигатели и различные системы не раз модифицировались и испытывались, хотя мы и не описывали огромный объем проделанной работы на сайте. Впрочем, мы рассказывали об изготовлении титановых рулей для сверхзвуковой ракеты.
Вот некоторые элементы ракеты.

Рассекатель сверхзвукового потока
Полетный контроллер ComFly-030, управляющий системой спасения, разделением ступеней и записывающий высоту полета
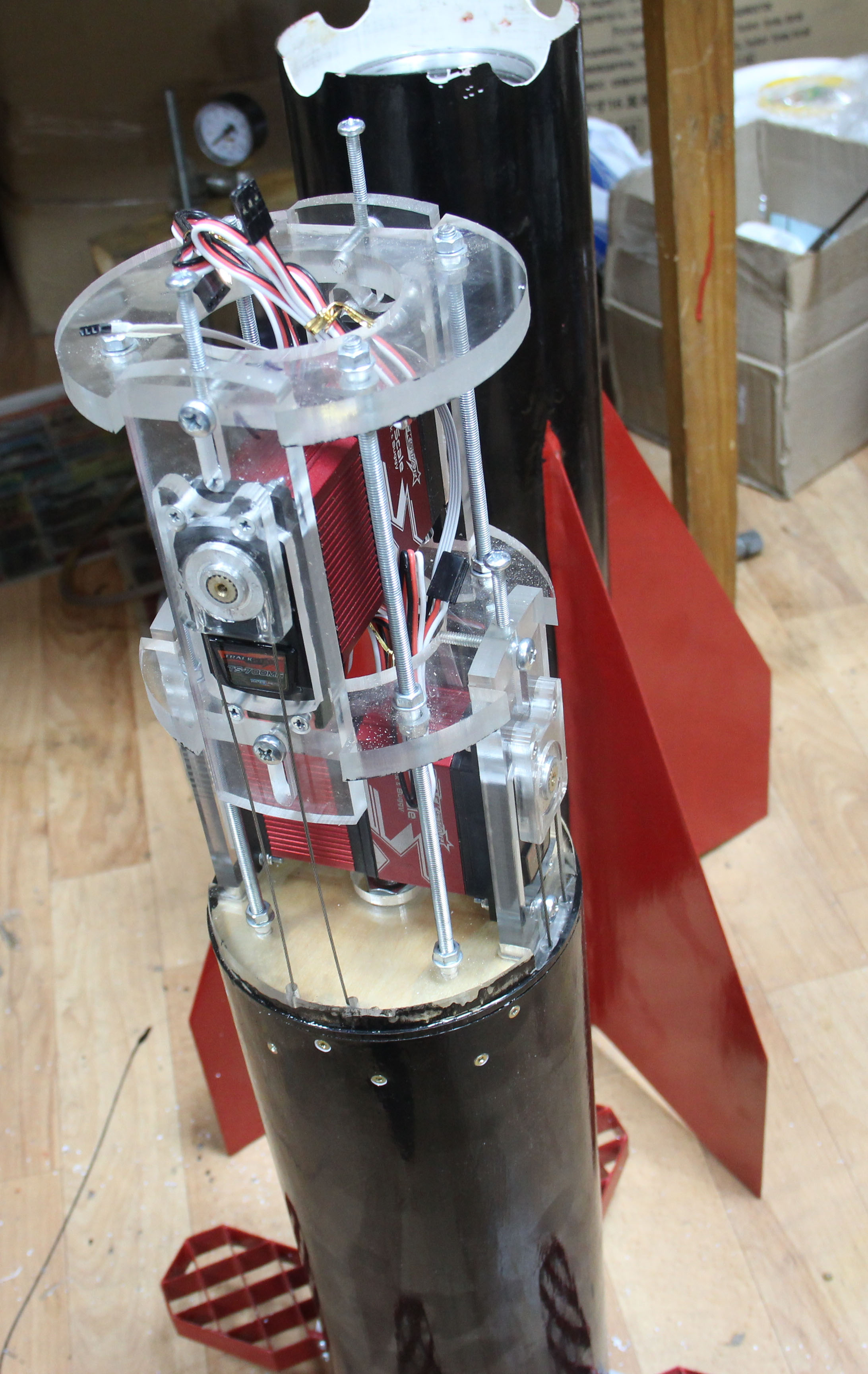
На переднем плане — вторая ступень без головного обтекателя и с открытым отсеком сервомашинок (видны тяги, идущие вниз к рулям). На заднем плане — первая ступень с плоскостными стабилизаторами.

Решетчатые рули крупным планом (внизу — стабилизаторы первой ступени, наверх идут тяги к сервомашинкам)

Один из парашютов
Поскольку первая ступень после завершения работы опускается вниз с высоты лишь около полукилометра, то найти ее легко. Для поиска второй ступени на ракете были установлены два GSM/GPS-трекера ТК102 (для надежности с SIM-картами разных операторов — «Мегафона» и МТС), а также радиотрансивер GPS-сигнала на 1Вт. Ускорение и высота также записывались прибором AltimeterThree. Видео на борту записывали две камеры WD80.
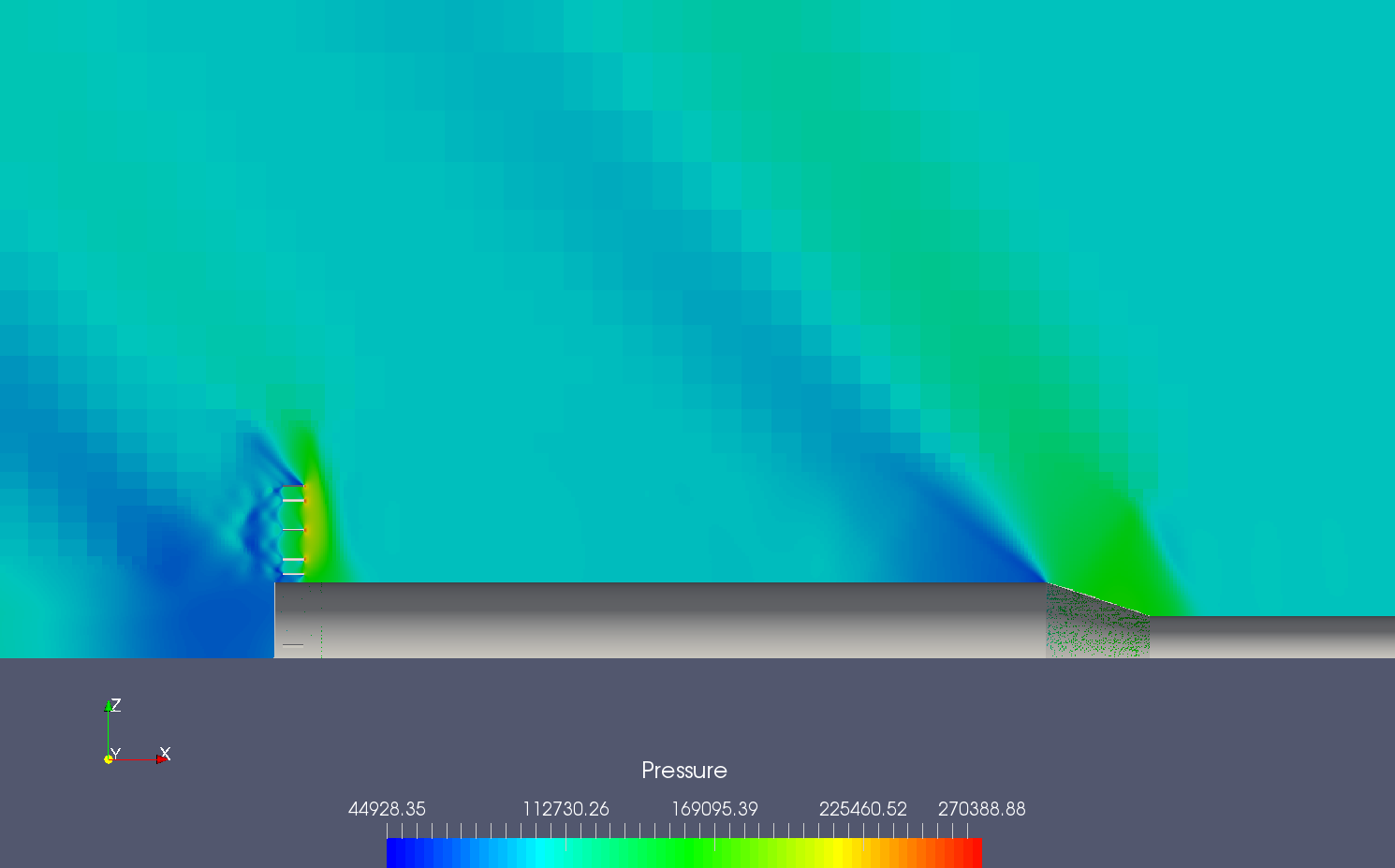
Для того чтобы узнать коэффициенты аэродинамического сопротивления (это нужно в частности для более точной оценки высоты полета ракеты), а также необходимые моменты на решетчатых рулях, было проведено численное моделирование обтекания ракеты потоком при разных числах Маха — с помощью программы FloEFD. Расчеты осуществлял подрядчик с лицензионной версией данной программы.
На иллюстрации ниже видно поле давления (Па) вблизи решетчатого руля при числе Маха равном 1,3.
В результате получилась двухступенчатая ракета со следующими параметрами.
Первая ступень:
- Масса — 6,5 кг
- Двигатель — МД-5000 (на перхлорате аммония)
- Полный импульс двигателя — 5000 Н∙с
- Масса двигателя — 5 кг (из них масса топлива — 3 кг)
- Время работы двигателя — 3 с
Вторая ступень:
- Масса — 8,5 кг
- Двигатель — МДТ-4000 (на перхлорате аммония)
- Полный импульс двигателя — 4600 Н∙с
- Масса двигателя — 5 кг (из них масса топлива — 3 кг)
- Время работы двигателя — 7 с
Отдельной сложностью стало официальное согласование места и времени запуска. В итоге мы получили разрешение Росавиации на запуск 27 мая 2016 года в определенном районе Кировской области с 11:00 до 12:00 местного времени. Небо было открыто только для нас, чтобы пуск не создавал помех самолетам и другим летательным аппаратам. «Лин Индастриал» благодарит за согласование пуска Екатеринбургский зональный центр ЕС ОрВД РФ и лично его начальника Сергея Николаевича Левченко.
Итак, 27 мая ракета была подготовлена к запуску, на ней были установлен решетчатые рули и сервомашинки, но не было самой система управления. Впрочем, в данном испытании не планировалось активно управлять полетом, а рули были застопорены. Кроме того, мы решили не запускать двигатель второй ступени в первом полете. Цель испытания — проверить работоспособность ракеты в целом.

В 11:40 по московскому времени ракета СВЗ-2 стартовала.

Запуск первой ступени прошел штатно по радиокоманде. Через 3 секунды после старта был подан сигнал на разделение ступеней. Разделение произошло на высоте 570 м с характерным хлопком. Ракета продолжила полет по инерции. Первая ступень приземлилась на парашюте на расстоянии 800 м от места запуска.
На высоте 2100 м был дан сигнал на выброс первого парашюта второй ступени, а на высоте 940 м — на выброс второго парашюта. Ракета без повреждений приземлилась на расстоянии 2 км от места запуска и была найдена по переданным GPS-координатам.
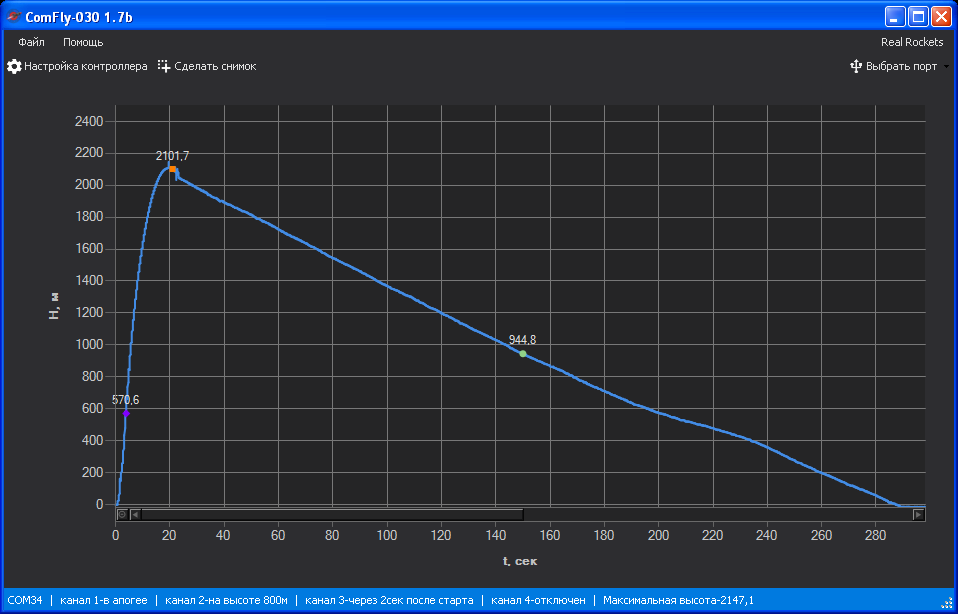
Высота полета ракеты от времени

Вид на Кировскую область с высоты около 2 км

Вторая ступень после приземления (виден первый парашют оранжевого цвета и второй — желто-черный)
Следующий полет СВЗ-2 состоится через несколько месяцев. В наших планах — несколько полетов для отработки конструкции ракеты, а затем полноценные испытания системы управления в полете на сверхзвуковой скорости.