Испытательная ракета: второй полет состоялся

Второй полет испытательной ракеты «Лин Индастриал» состоялся 14 августа 2015 года.
Конструкцию данной ракеты мы подробно описывали ранее.
К этом полету мы доработали систему управления, систему спасения, стартовый стол, упорядочили предстартовые процедуры и установили на ракету две видеокамеры.
Основная цель — проверка работы системы управления. Если в первых испытаниях решетчатые рули ракеты были застопорены и просто стабилизировали полет, то сейчас должны были работать две из четырех рулевых машинок, чтоб предотвратить вращение ракеты вокруг продольной оси (т.н. оси крена).
Система управления
К сожалению, в полете работала только одна из рулевых машин. Всплыла их особенность — иногда при включении машинка начинала потреблять ток, намного превышающий номинальный. При этом в стабилизаторе напряжения включалась защита и команды на рулевую машинку переставали проходить. Во время наземной отработки мы побороли эту особенность, немного изменив принципиальную электрическую схему и включая машинки за несколько секунд до старта. Однако во время реального запуска она снова проявилась. Решение проблемы — перейти на другие модели рулевых машинок к следующему испытанию.
Тем не менее один руль работал, что видно на видео, а также по данным с датчиков. Подробный разбор результатов — ниже. Для начала насладимся видео.
В ролике видно, как один из рулей поворачивается, пытаясь замедлить вращение ракеты вокруг своей оси.
Для простоты понимания мы приводим на одном графике ускорение вдоль продольной оси ракеты и угол поворота ракеты вокруг продольной оси (оси крена). Если быть точным, то это не угол, а интеграл угловой скорости вокруг оси крена. Поскольку на нашей ракете нет гиростабилизированной платформы, то углы совпадают с интегралами угловых скоростей, снятых с датчиков, только при малых углах отклонения ракеты от вертикали (малые — до 20 градусов).
Угол поворота вокруг продольной оси (градусы) / Ускорение вдоль продольной оси (м/с2)
График ускорения интерпретировать просто. От старта до примерно 2-й секунды полета ракета летела с ускорением, поскольку работал двигатель. Затем ускорение было нулевым — ракета свободно падала. Пик на 11 секунде — удар ракеты о землю. Пик на 12 секунде — выброс парашюта, поскольку из-за нашей ошибки парашют сработал уже на земле (подробнее об этом ниже).
Интерпретация графика угла следующая. До 2,5 секунд ракета успевала повернуться вокруг продольной оси три раза туда и обратно на угол примерно ±5 градусов. Это говорит о том, что система управления работала — как только корпус ракеты поворачивался на 5 градусов, система поворачивала руль так, чтоб воздушный поток поворачивал ракету в другую сторону. Затем цикл повторялся.
После 2,5 секунд полета угол поворота резко вырос. Первоначально мы приписывали этот поворот внезапному порыву ветра, но потом выяснили, что не учли в программе управления особенность работы MEMS-гироскопа — когда угловая скорость превышает определенный порог (в данном случае 62,5 градуса в секунду), точность датчика резко падает. Тем не менее, видно, что колебания по углу продолжались и дальше, то есть система управления пыталась повернуть ракету обратно.
Еще одно наблюдение — период, за который система управления поворачивала ракету в одну сторону, а потом в другую, уменьшался по мере роста скорости ракеты и увеличивался, когда она начинала замедляться. Причина в том, что в нынешней программе управления не учитывается увеличение управляющего момента из-за роста скоростного напора. В будущем этот закон будет учтен.
Зная массу и конструкцию ракеты, мы посчитали момент ее инерции. Поскольку скорость вращения ракеты вокруг оси можно узнать из приведенных выше графиков, то мы смогли примерно вычислить управляющий момент, который создает решетчатый руль. Он с точностью до 2 раз совпадает с тем, что мы измерили, обдувая ракету вентилятором, когда настраивали систему управления перед полетом.
Главное — система управления в принципе работает. Теперь ее можно отлаживать, совершенствовать, заменять рулевые машинки и т.д.

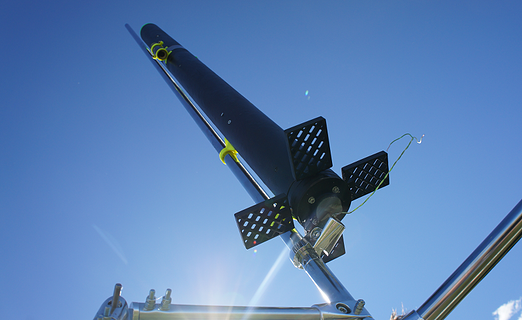
Ракета в сборе с новыми элементами конструкции: решетчатые рули, направляющие кольца, видеокамеры, обтекатель
Система спасения
Система спасения — в отличие от первого полета — сработала, но не так, как хотелось. Парашют вышел и даже не обгорел, поскольку мы усовершенствовали выброс парашюта. Вышибной пороховой заряд помещался в металлический стакан и накрывался сверху другим тонкостенным металлическим стаканом, который вышибался пороховыми газами и выталкивал наружу парашют и обтекатель.
Однако полетный контроллер ComFly-030, который должен был по датчику атмосферного давления определить наивысшую точку подъема ракеты и затем поджечь вышибной заряд, почему-то не сработал. Возможно, и в первом пуске парашют не вышел из-за контроллера, а не из-за того, что мы забыли подсоединить провода. Профиль высоты полета, правда, ComFly-030 записал. Максимальная высота составила 115 м.
Однако на этот раз выброс парашюта был продублирован. Основная система управления выбрасывала парашют через 12 секунд после старта. В прошлом пуске этого бы хватило, но сейчас из–за установки видеокамер ракета оказалась тяжелее и упала на 6 секунд раньше, чем в прошлый раз, и на 1 секунду раньше, чем сработал вышибной заряд. Поэтому парашют вышел уже на земле.
При падении сломались два руля, но металлические оси, на которые они крепились, не повреждены. Напечатаем новые рули на 3D-принтере!
В этом пуске мы испытали новый стартовый стол, который полностью себя оправдал. Он разборный, причем наклон направляющий можно регулировать или даже полностью ее снять для удобной установки или транспортировки в автомобиле. Для старта на 3D-принтере были распечатаны новые направляющие кольца для ракеты, а также крепления видеокамер и новый обтекатель.
Кроме того, был облегчен на 200 г хвостовой отсек. Поставлены новые тяги, которые передавали усилие с машинок на рули — с пружинами (они сами подтягиваются, не провисают). В этом пуске на ракете отсутствовала электронная плата на платформе Arduino, которая в прошлом полете дублировала данные с датчиков на SD-карту. Мы решили кардинально улучшить ее функциональность и на время доработок сняли с ракеты (подробнее о доработках — ниже). Поэтому данные с датчиков записывались только в память системы управления.
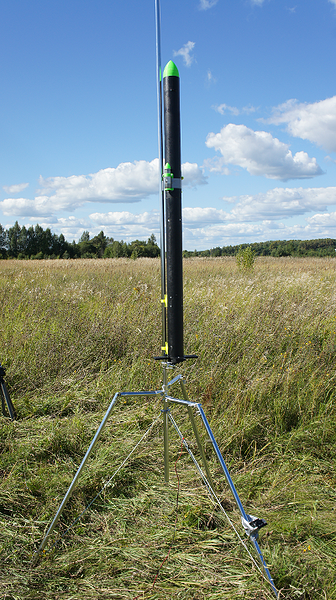
Ракета на стартовом столе
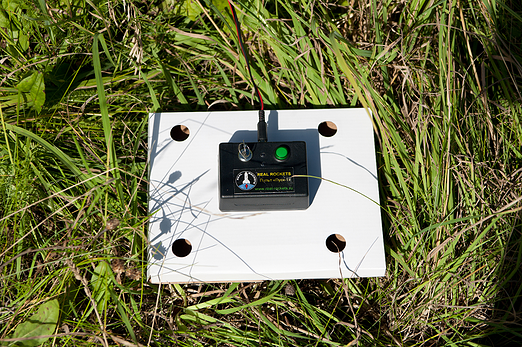
Стартовый пульт производства российской компании Real Rockets
Ракета на стартовом столе (вид снизу)
Операции при подготовке к пуску на этот раз проводились в соответствии с заранее составленным списком. Отсеки закреплялись винтами не вручную, а шуруповертом, что гораздо быстрее. К следующему пуску мы планируем вывести служебные электронные разъемы на корпус ракеты, чтобы не разбирать/собирать его при подготовке к старту.
Планы к следующим испытаниям:
• Отказаться от контроллера ComFly-030, поставить барометрический датчик для записи высоты и выброса парашюта на основную систему управления. Соответственно, понадобится установка дополнительной флеш-памяти.
• Увеличить активный участок полета, иначе очень трудно интерпретировать данные и отлаживать систему управления. Она работает во время работы двигателя, так как рулям нужен напор воздуха.
• Для увеличения активного участка поставить на ракету два дополнительных твердотопливных двигателя, которые будут работать на старте. Центральный двигатель запустится уже в полете.
• По вертикальной оси поставить отдельный акселерометр, который сможет измерять большие ускорения при старте на двух двигателях без зашкаливания.
• Довести отдельный электронный блок на базе Arduino. Сначала он должен сбрасывать данные GPS по Wi-Fi на землю. Затем — передавать по Wi-Fi всю телеметрию и видео.

Видеокамеры с креплениями и обтекателями, изготовленными на 3D-принтере
Прежде чем перейти к отработке системы управления на сверхзвуковой ракете (запланировано на конец года), мы проведем серию испытаний системы на уже существующей дозвуковой ракете. Естественно, будет отработано управление не одним, а всеми рулями.
«Лин Индастриал» уже традиционно благодарит аэродром «Мельница» под Переславлем-Залесским и лично его начальника Александра Ивановича Воробьева за предоставленную площадку для пусков, небо над которой закрыто для других летательных аппаратов в соответствии с российским законодательством.
